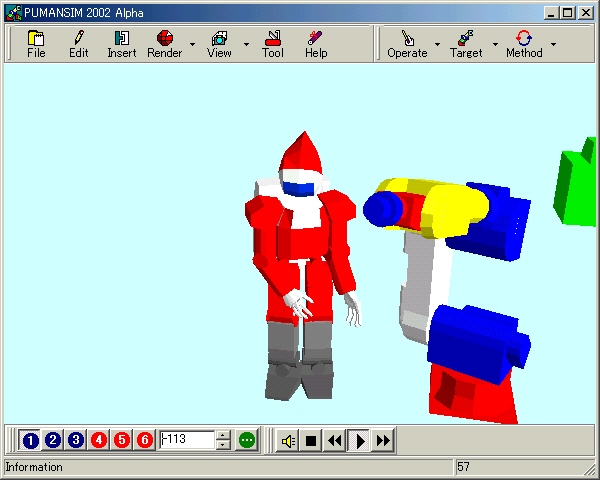
PUMANシリーズは,産業用6軸ロボットのシミュレーションソフト制作を最終目標とします。 マウスやキーボードを動かしてつくったロボットのポーズデータ、 シミュレーションソフトで計算してつくった運動計画データ などをWindows上で 高速動画再生させます。産業用6軸ロボットのみならず、3次元モデルの階層構造をユーザー定義でつくることができ、左画像のように工場の生産機械さらには人体モデルまでをバーチャル空間に再現します。もちろんすべてのモデルひとつひとつにアニメーション動作を指定できます。このようにPUMANはリアルタイム3DCGによるインタラクティブな環境を提供し、生産設計にユーザーを積極的に関与させます。たとえば工場へロボットを導入するとき、他設備との干渉など起きうるアクシデントを事前に知ることができます。
このホームページからダウンロード可能です。 PUMAN Robot-Simulator for Direct3D (ver.0.95 1997公開中)
近況
新しいシステムでロボットシミュレータを開発中です。詳細情報はコチラの日記を参照ください。
レイアウト検討を超えたバーチャラボシステム〜ver.0.95の機能概要説明〜
チュートリアル
その他
PUMAN Robot-Simulator for Direct3D ver.0.95のダウンロード
「PUMANSIM2002」は,産業用6軸ロボットまたは人型ロボットを中心とした生産工程のシミュレーションを行なうことを主な目的とするリアルタイム3DCGソフトです。本ソフトは,旧「PUMAN Robot-Simulator」の後継ソフトとして位置付けます。
右のコントローラは、Micorosoft製 Side Winder Free Styleです。 コントローラはUSBケーブルでWindows98マシンに接続できます。 このコントローラは姿勢検出装置を内蔵していて、コントローラの傾き量をアナログ値で入力できたりもします。さらに別バージョンのコントローラに、力フィードバック機能をもつものがあり,操作時に振動や抵抗力を実現できます。
PUMANSIM2002はDirectX5のDirectInput機能に対応することで、一般のゲーム用コントローラで操作できます。現時点では、Side Winder Free Style以外にも,PlayStation2のコントローラを使って操作できます(ただしSMART JOY PAD3が必要)。子供でも扱えるゲームコントローラは、ある意味たいへん優れたマンマシンインターフェースで,仮想ロボットをコントロールできたらいいな。