はじめに
先述のモデリングパラメータ(以下MDL)により、ロボットを除く機械部品をすべてバーチャル空間に配置することが可能です。
ですが、ひとつの製造工程は複数の機械で構成されているため、モデリングパラメータも複数個呼び出さなければなりません。非常に面倒くさい作業です。
シーンパラメータ
PUMANはシーンパラメータ(以下SCN)の採用により、MDL(モデリングパラメータ)ファイルを、逐一エクスプローラ画面を用いて何度も読み込むことなく一括で与えることを可能にしました。
つまり、製造工程の一背景(シーン)を定義するためのパラメータファイルとして位置づけられます。ですので、ロボットのモーションデータも同時に指定します。
さらに本ソフトの画期的な点が、 MDL同士に新たに親子関係を定義する2重のモデリングパラメータとして働かせる機能をもつ点です。
親子関係を追加する
「親子関係に親子関係を定義する」シーンパラメータの機能を説明します。
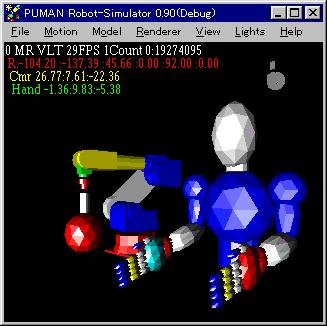
左画像をごらんください。
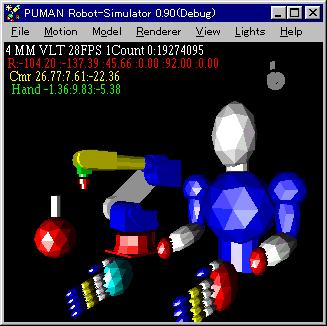
人体モデルと、手先ツールのついたロボットが用意されています。この2つのモデル構造は、右画像のような
(1)人体の胴体+腕、(2)右手、(3)左手、(4)手先ツール
といった複数のMDLから構成されるものです。
右手は右手だけでアニメーションさせることは可能ですし、それぞれは個別で存在しているものです。PUMANではSCNの機能により、右腕と右手を接続するといった、MDL同士に親子関係を追加しています。
これにより、腕と手は接続されていながら、人の上体のポーズと指の動きとは別々のタイムテーブルで動かすことができます。例えば手話のように、同じ腕の形(肩と肘の曲げや、手の位置)でも、手の形が異なるだけで意味合いが全く違う、といったデータを組み合わせて管理していくのに便利です。
また、開閉するチャックハンドのようなツールをロボット手先に取り付けて、その動きを自在に指定することができます。もちろん、ロボット手先に取り付ける機械要素はユーザーが製作した分だけ、つまりマシニングセンタのように無限の加工シーンを再現できます。
とりあえず転載禁止
Copyright Takashi Horinouchi 1997. All rights reserved.