マウスコントローラには、 ロボット、カメラ、選択モデルの操作モード指定の他に、 アニメーションの再生/中止ボタンがついています。
他にも ロボットコントローラ、 モデルコントローラ といった見た目にわかりやすいコントロール専用ウインドウを提供しています。
 まえがき
まえがき
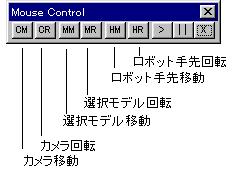
左図2.1にマウスコントローラという操作用のダイアログボックスを示します。適切なモードを選択することで、直感的かつ軽快な操作が可能です。
操作モードは、操作する対称によって大きく、「カメラ」「選択モデル」「ロボット手先」の3グループに分けられ、操作方法では「移動」「回転」の2種類とします。
操作モード
カメラ
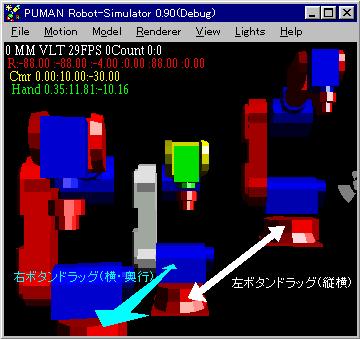
「カメラ移動」の操作モードを選択すると、画面上をクリック後、ドラッグ(押したまま)の状態で、
左ドラッグなら上下と左右方向に
右ドラッグなら奥行きと左右方向に動かすと、ウインドウという画用紙を引っ張り動かすような感覚で、カメラ視点を操作できます。もちろんカメラ視線を動かすのも、右・左ボタンで、回転方法を選べます。
選択モデル
選択モデルとは、ユーザーが画面上でクリック選択したすべての3D物体です。
「選択モデル移動」 の操作モードを選択したのち、 PUMANのウインドウ上(図2.2参照)で 動かしたい3D物体にマウスカーソルを合わせてクリック選択して、
左ドラッグなら上下と左右方向に
右ドラッグなら奥行きと左右方向にモデルを移動させることが可能です。つまり マウスで物体をつまんで動かすような操作感覚です。もちろんモデル回転も右・左ボタンで、回転方法を選べます。
ロボット手先
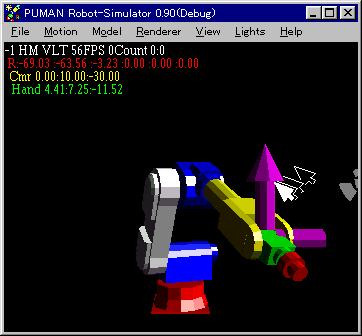
さらに「ロボット手先移動」モードなら、ロボットの6つの回転軸を意識せず、 手先に表示される座標軸をつまんで動かすといった、手先位置決め (図2.3参照)を行うことができます。
これにより、ダイレクトティーチング(直接教示方式)にも似た操作感覚で、直感的にそして容易に動作教示できるという特徴があります。
その他
マウスコントローラには、 ロボット、カメラ、選択モデルの操作モード指定の他に、 アニメーションの再生/中止ボタンがついています。
他にも ロボットコントローラ、 モデルコントローラ といった見た目にわかりやすいコントロール専用ウインドウを提供しています。
 |
 |
とりあえず転載禁止
Copyright Takashi Horinouchi 1997. All rights reserved.