|
|
1997.11.08
堀ノ内貴志
私が個人で制作しているソフトウェアについて紹介します。
拙作PUMAN Robot-Simulator for Direct3D (ver.0.95)は、産業用6軸ロボットをパソコンのディスプレイ上に再現します。実ロボットはステップの教示をティーチングペンダントで行いますが、PUMANはマウスの操作のみで全ての教示・再生を行うことができます。
さらにロボット以外にも自分の思い通りの立体(ユーザー定義モデル)を3D空間に置くことができ、たとえば、建て屋レイアウトや、コンベアほかの生産機械、さらには人体を仮想空間に再現します。カメラ視点も自由に変えられるため、より臨場感のあるレイアウト検討のための環境を与えます。
これらユーザー定義モデルにもアニメーション動作をステップ教示することができます。各々をタクト時間で動作させることにより、工程中の作業分析に役立ちます。
拙作PUMANはロボットシミュレータとして分類されますが、この分野で商品として販売されている他のソフトは、高機能のためスーパーコンピュータクラスのマシンが必要で、かつあまりにも高価であるため、主に企業の研究機関や国立大学の一部のみに納められています。
対してPUMANはインターネットを仲介して世界中に無料で配布され、普及機であるWindows95マシンで稼働するフリーウェア(※1)です。そのため現在、工業高校や大学などの教育機関で教材としての導入の申し出を受けています。また手話やスポーツ身体運動解析などにも応用が可能です。
 拙作PUMAN
Robot-Simulator 0.95は、標準として産業用6軸ロボットデータをMS社製 8kg可搬をモデルとしたデータを添付しています。
拙作PUMAN
Robot-Simulator 0.95は、標準として産業用6軸ロボットデータをMS社製 8kg可搬をモデルとしたデータを添付しています。
今回新たに左画像のF社製 130kg可搬を制作しました。所要時間約2時間。3D-CADソフトPolyEditで制作できます。F社製 50kg可搬も制作しています。
これらロボットのリンク寸法はすべてカタログから得ています。細かい部分は絵から寸法を拾います。
このロボットはマウスだけで操作できます。
このときステップの教示が可能で、実時間で再生することもできます。つまりロボットの1サイクルの動きを、画面に表示されたストップウオッチで測ることができます。
再生はティーチングそのままの動き(直線補間、リンク補間、待機)、またはタクト的な動き(タイムテーブル)を実現します。
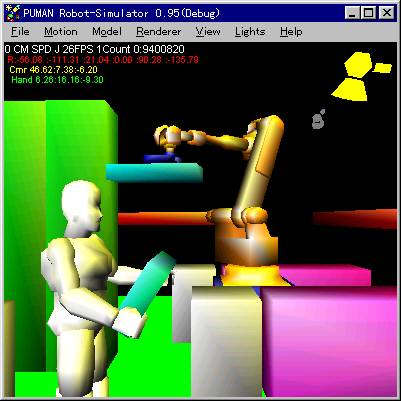
2-2.手先にツール(治具)を用意する
 ロボットの手先には、自分の制作した手先ツールを取り付けることが可能です。
ロボットの手先には、自分の制作した手先ツールを取り付けることが可能です。
この画像は、ロボット手先にパッドが付いていて、それにワークを吸着している状態を表現しました。ワークをもった状態での、ロボットアームや他設備との干渉をチェックすることができます。もちろんバーチャル物体なので、いくら衝突させても壊れません。
ほかには溶接ガン、チャックハンドデータを添付しています。
現バージョンでは、手先ツールがワークを離したり掴んだりするアニメーションは実現していません。
 1体のロボットを囲んだ工場建て屋のレイアウトの作成を行います。
1体のロボットを囲んだ工場建て屋のレイアウトの作成を行います。
建て屋を構成するパーツはすべて、100mm立方体と、100mm平方板のデータ2つだけで構成されています。パーツの寸法にあわせた倍率を乗することで、たいていの建て屋レイアウトは3D立体化できます。もちろ]ん、自分ごのみの物体をCADで製作し、配置することができます
2-4.設備レイアウト作成
 この画像は、建て屋に生産機械や搬送機械を配置した状態です。これも2つのデータ(箱と板)だけで構成されています。これで漫画レベルの3Dレイアウトは完成です。
この画像は、建て屋に生産機械や搬送機械を配置した状態です。これも2つのデータ(箱と板)だけで構成されています。これで漫画レベルの3Dレイアウトは完成です。
水色は通路を横切る移載機を示しています。
 さらにワークを画面内に置くことで、工場のだいたいの大きさをイメージできます。
さらにワークを画面内に置くことで、工場のだいたいの大きさをイメージできます。
また添付してある人体モデル(身長165cm)をおけば、作業者と設備とがどのような干渉がありえるのかをチェックできます。
 壁が邪魔になったときは、線描モードに切り替えると、横切った柱や設備を透視してみることができます。
壁が邪魔になったときは、線描モードに切り替えると、横切った柱や設備を透視してみることができます。
指定物体をマウス操作だけで削除したり、コピーすることもできます。
2-7.グーローシェーディング設定
 黄色ライトをひとつ追加して上から照らしし、さらに物体に丸みを与える設定にするとよりリアルさをまします。
黄色ライトをひとつ追加して上から照らしし、さらに物体に丸みを与える設定にするとよりリアルさをまします。
工場内はカメラ操作により、自由な視点でみることで、改造後のイメージ化が容易に行えます。また手先を注視するモードをONにすると、同じカメラ位置で視線だけが、ロボット手先を自動追尾します。
人体にポーズをとらせることも、マウス操作だけで簡単です。また定形のポーズを呼び出すこともできます。
 物体の色を切り替えるのも簡単に行えます。壁や床の色の選択は、作業者の心理状態に影響を与えます。
物体の色を切り替えるのも簡単に行えます。壁や床の色の選択は、作業者の心理状態に影響を与えます。
この画像にあるように、ロボットや自分の考える運動機構を持つ生産機械まで配置することができます。
産業用6軸ロボットはもちろん、配置した生産機械、さらには人体モデルにまでアニメーションを設定することが可能です。つまり作業者も含めたタクトや生産計画の検討ができる3Dシステムを実現しています。
この説明資料も含めて制作時間は正味半日でした。
以上、工場のレイアウト検討におけるPUMANの"バーチャラボシステム"の有効性を知っていただけたかと思います。