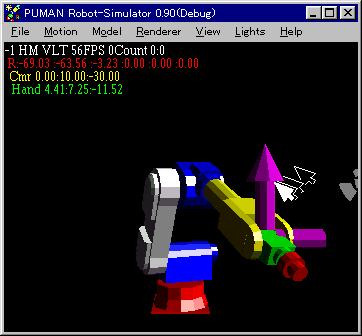
PUMAN Robot-Simulator for Direct3D
逆運動学計算による手先位置制御
まえがき
実際の産業用ロボットの場合、ポイント教示方式として、6個の各軸を操作する軸操作モードと、ロボット手先を動かす手先操作モードが必ず存在します。
そのため、ロボットの教示ポイントデータも、6軸の関節角データばかりでなく、手先位置・姿勢データを持っている場合があります。
「手先操作」のメリットとしては、たとえばロボット手先を地面に垂直方向に動かそうとするとき、手先操作ならZ軸移動ボタンひとつで可能ですが、軸操作では2軸と3軸のボタンを絶妙な加減で操作する必要があります。つまり手先操作はより直感的、作業目的にあった教示方式です。
普段は隠れた制御部分ですが、手先操作を行うには複雑な計算式、「逆運動学計算」が必要になるのです。
逆運動学計算
PUMANはDH法(後述)に基づいた逆運動学計算アルゴリズムを導入しています。逆運動学計算に対応したことでより実ロボットに近づいたといえるでしょう。
教示の場合
 ロボットコントローラの手先位置姿勢を動かすボタンのクリックで、手先は上下左右前後に動かせます。
ロボットコントローラの手先位置姿勢を動かすボタンのクリックで、手先は上下左右前後に動かせます。
マウスコントローラのボタンでロボット手先操作モードを選択し、表示される座標軸をつまんですっと動かすだけで、手先の移動に合わせてロボットの6軸が適当に回転してくれます。
手先が平行移動する際も、対地面での手先姿勢は保持されます。たとえばロボットの手先に盆をとり付け、その上にコップを載せたとして、これをこぼさないように平行移動できます。
PUMAは、6軸ロボットは手先の位置姿勢が一つ決まると、それを実現する関節角の組み合わせは8通りで、
その組み合わせを自分で選択できます。
再生の場合
アニメーションモードのうち、フレー管理型、周期管理型、任意時間管理型では、再生中に、手先/軸動作の切り替えボタンを押すと、瞬時にモードが切り替わります。逆をいえば、手先/軸のどちらかしか選択できません。
実際のロボットは、ロボット命令言語により、手先移動/軸回転を切り替えて動いています。速度管理型はステップデータの中に、補間方法として直線補間、リンク補間、指定時間だけ待機の3つのうち選択できるため、ほぼ同様の動きをさせることができます。


DH法
ロボットの階層構造の設定方法にDH法を採用しました。
DH法というのは階層構造中の物体同士の相対位置や相対姿勢の決定方法で、
ロボット工学でよく使われる手法です。 これに準拠した構造の設定を行うと、
3次元の運動学の解析が(わりあい)容易になるという利点があります。
例えば、人間の腕の手先位置から、適切な肩・肘・手首の回転角度を計算する。インバース・キネマティクス法に利用します。
とりあえず転載禁止
Copyright Takashi Horinouchi 1997. All rights reserved.
 次の項目へ
次の項目へ
PUMANのページに戻る