
まえがき
コンピュータ上でバーチャルロボット単体を動作させるだけでは、ファクトリーシミュレータの用をなしません。なぜなら産業用ロボットは、工場のなかの一工程に組み込まれるユニットとして、生産システムに導入されるからです。
産業用6軸ロボットの用途として多い溶接作業を例にあげると、
- ロボットの手先に溶接ガン(手先ツール)を取り付ける。
- 溶接の対称となる部材(ワーク)を設置する。
- なかにはポジショナーと呼ばれる駆動装置の上にワークを載せる場合もある。
- 工場レイアウトを再現する。
(床、天井、柱などロボット周辺で邪魔になるもの)- 同期して動作する、他の生産設備や作業者を配置する。
(搬送コンベアや、ワークの供給者など)などが、溶接というひとつの製造工程を構成する要素です。
PUMAN Robot-Simulatorではモデリングパラメータ機能を用いることで、ロボットを中心とした周辺の生産機械などをバーチャル空間に設置します。すべて同期させて動かすことで、
- 「教示内容に間違いはないか?」
- 「ロボットと他設備との干渉はないか?」
- 「目標とするタクトにおさまるか?」
を検討することが可能です。
モデリングパラメータ
モデリングパラメータ(以下MDL)は、ユーザー定義により3D階層構造モデルを生成するために記述するパラメータファイルのことです。ユーザーがメモ帳などのエディタを用いて、直接書き換えることができるよう、MDLファイルはテキストデータです。MDLファイル内では、
- 階層構造モデルで使用するパーツ名
- パーツ同士の親子関係
- パーツのサイズと色
- パーツの表示/非表示
といった設定データを書き込みます。
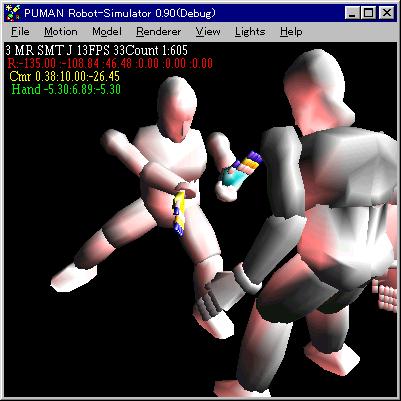
例えば、MDLにより左下画像の人体モデルのように複雑な階層構造モデルを定義できます。MDLによりPUMANの画面に現れた3D物体をここでは生成モデルと呼ぶことにします。(ちなみに左下画像ではロボットを非表示にしています)
また右画像のように、ロボット手先に溶接ガンのような器具を追加できます。
さらに構成する各パーツを適当に動かしてポーズをとらせる。
そしてポーズとポーズとの間をタイムテーブルを基に適当に補間し、ロボットと同期させてアニメーションさせることが可能です。ちなみに左画像は、人体モデル2体を並べ、協調アニメーションをさせています。このようにPUMANは複数のMDLを個別に管理できます。
よって、複数の生成モデルを、同時または選択的にアニメーション再生したり、 モーション生成することが可能です。
とりあえず転載禁止
Copyright Takashi Horinouchi 1997. All rights reserved.