K69.気温観測用 Pt センサーの安定性と器差
著者:近藤 純正
野外における気温の精密観測、例えば日だまり効果による気温のわずかな違いを観測
するために、Pt-1000オームの抵抗温度計を用いる。本章では、まず、白金センサー
について室内実験による器差と安定性を調べた。気温5~35℃の範囲について標準
温度計により検定した。記録装置(データロガー、入力モジュール)とPt-1000オーム
素子、それぞれの精度についても調べた。
2本のPtセンサー間の相対的な器差は±0.04℃である。
この器差補正を行えば、数時間以上の長時間の平均気温を求めると
き(サンプリングの資料数が数百個以上)の絶対的な誤差は±0.01℃であり、
2本のPtセンサー間の相対的な誤差は±0.003℃である。ただし、これはPt-1000
素子と記録装置を含む精度である。
付録として、サーミスタのセンサーについても検定した。器差はPt-1000素子に比べて
大きいが、器差補正を行えば0.01℃の精度で長時間の平均気温が求められる。
野外観測では放射(日射と大気放射)の影響を受けるので、完全な通風装置を用いる
必要があり、その問題については、別章で述べる予定である。
(完成:2013年1月17日)
本ホームページに掲載の内容は著作物であるので、
引用・利用に際しては”近藤純正ホームページ”からの引用であることを
明記のこと。
更新の記録
2013年1月10日:素案の作成
2013年1月11日:付録の図69.4を追加
2013年1月15日:付録2を追加
2013年1月16日:メーカの指摘によりデータロガーの精度・価格など訂正
2013年1月17日:付録3を追加
目次
69.1 はしがき
69.2 Pt-1000 オーム・センサーと測定方法
69.3 センサーとデータロガーの調整(アジャストメント)
69.4 2個のセンサー間の相対的な器差
69.5 標準温度計による検定
69.6 Pt-1000 センサーの補正図
69.7 まとめ
付録1 Pt センサーとデータロガーの組み合わせを変えた試験
付録2 Pt センサーとデータロガーの組み合わせを元に戻した試験
付録3 他形式の「おんどとり」の検定
参考文献
69.1 はしがき
日だまり効果
長期の気候資料の解析で問題となるのは、観測所周辺の環境変化によって露場で観測
される気温にずれ(誤差)が含まれていることである。ただし、観測所周辺数kmの
広い範囲の都市化によるものであれば、それは都市気候の変化として現れたもので
あり、ここでは問題にしない。
いっぽう田舎の観測所であっても、ごく近傍10m~100mスケール範囲内における
樹木の成長や建物の増加によって露場の風速が弱められ、日だまり効果で年平均気温
は0.1~0.4℃程度上昇する。この上昇量は地球温暖化量の100年間当たり上昇量0.7℃
に比べて無視できない大きさである。この誤差と局所的な環境変化との関連を明らか
にしなければならない。
図69.1は年平均風速の変化と日だまり効果による年平均気温の上昇量との関係を表した
もので、気象観測所の長期資料から見出された(近藤、2010;2011)。目安として、
年平均風速の10%の減少が年平均気温の0.1℃の上昇量に相当している。
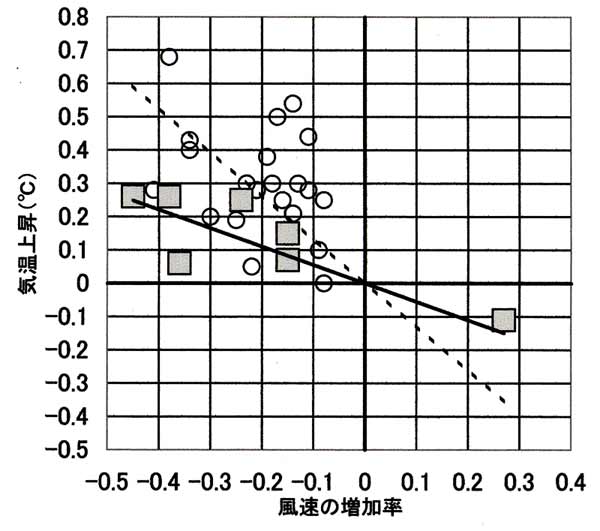
図69.1 風速の変化と日だまり効果による気温上昇の関係.
四角印はおもに樹木の成長により日だまり効果が生じたと考えられる地点,丸印は日
だまり効果に都市化の影響も含む可能性のある地点を示す(
近藤(2010;2011)、あるいは「研究の指針」の「K45.気温観測
の補正と正しい地球温暖化量」の図45.6に同じ;
「K46.日本における温暖化と気温の正確な観測」の図46.1に同じ).
露場風速と気温の関係を理解するために、本シリーズ研究「日だまり効果の基礎研究」
(K55~)では、まず、「露場の風速減少」の基本的なことから調べてきた。
日だまり効果のうち、日々の気温(最高気温、最低気温、日平均気温)に及ぼす
影響ついては、詳しいことは明らかにされていない。そこで、周辺10~100mスケール
の環境変化による局所的な風速(露場風速)の減少と気温の変化量(日中の気温上
昇量、夜間の気温下降量)との関係を具体的に見出したい。その際、広い露場の気温
と狭い露場の日だまり効果による気温の差は2℃以下であり、高精度の観測が要求さ
れる。
各地での野外観測
地表面状態(植生、土壌水分、粗度)がまったく同じで、風速(露場風速)のみ違う
条件の広・狭の対になった露場は存在しなく、純粋の日だまり効果のみによる気温差
の観測はできないので、日だまり効果の観測はいろいろな場所で行う必要がある。
その試みの観測が数か所で行われ、結果の見通しがついている。その観測では、
アスマン通風乾湿計2台を用い、広・狭の空間(露場)で気温差を測った。読取精度を
上げるために、乾球・湿球ともに乾球として用い、1分間隔で連続2時間を1シリーズの
観測とした。なお、アスマン通風式乾湿計に及ぼす放射の影響は調べてあり、
0.03℃以内の精度は十分にある(「K60.森林の開放空間“日だま
り”の気温」の60.6節を参照)。
アスマン通風式による温度計の読取作業は日中ならよいが、最低気温が生じる早朝から
日の出の時間帯に観測することは難しくなる。今後、日中・夜間ともに自記記録装置
によって、各地の広・狭の多数の空間(露場)で観測したい。
野外の気温を正確に測るには、通風筒は外筒と内筒の2重、さらに直射除けを用いなけ
ればならない(近藤、1982、図3.5)。通風速度>3m/sが望ましい。AC電源が利用で
きる場合、通風筒の実例は「K34.通風式標準温度計2号機」
に示した。
今回は長期間の観測ではなく、数時間~1日程度の観測を目的としており、観測装置
は乾電池式で手軽に持ち運びができ、設置も楽でなければならない。検討すべきは
次の2つである。
検討1:気温センサーの安定性と器差
検討2:通風装置の製作
本章は「検討1」について述べるものであり、「検討2」は別章で取り扱う。最終的な
観測精度は±0.03℃以内を目標とする。本章の「検討1」では±0.01℃の精度を目標
とする。
69.2 Pt-1000 オーム・センサーと測定方法
温度計の安定性を重視し、気温センサーは白金抵抗体を用いる。現在、汎用されている
Pt-100オームセンサーは抵抗値が小さく、接触抵抗の僅かな違いが観測誤差となる。
これは著者が気にしてきた問題である。特に野外観測のように、観測条件が厳しい
場合、3線式でも4線式でも同じことだが、センサーと記録部をつなぐ差し込みやネジ
の締め付け具合などで0.1~0.2℃程度の誤差が生じる。過大でなく過少でもない一定
の力で締め付けなければ誤差が生じた。100オームの白金抵抗体は0.1℃の温度差が
0.004オームの抵抗差に相当する。
Pt-1000センサー:
最近ではPt-1000オームの測温抵抗体も製作・市販されるようになった。今回、
立山科学工業製のPt-1000オーム・センサー2本を用いる。白金素子は外径=2.3mm、
長さ=50mmのSUS保護管に封入されており、リード線(長さ=1500mm)はフッ素樹
脂被覆電線、使用温度範囲は-20~200℃である。形式はSTP-02(T57592-06)、
本当たり12,000円である。2本のセンサーは、それぞれk01とk02と名付ける。
データロガー:
T&D社製の小型データロガーの「おんどとり」TR-55i-Pt(PtモジュールPTM-3010 付き、
標準価格19,000円, 税別) 2個と、コミュニケーションポート(TR-50U2、
標準価格15,000円, 税別)を利用する。
Ptモジュールは、データロガーとPtセンサー間をつなぐ部品で、0.1℃単位の器差の
調整(アジャストメント)をすることができる。コミュニケーションポートは読取
装置であり、PCと接続して気温データの吸い上げに用いる。
取扱説明書によれば、このデータロガーの精度は±0.3℃+読み値の0.3%(10~40℃
範囲、センサーの誤差は含まず)、動作環境10~40℃、湿度90%以下、直射光は当て
ない。記録間隔は、1秒、2秒、5秒、・・・・1分、2分、・・・・60分を選択するよう
になっている。
記録データ数は16,000個である。20秒間隔の場合、89時間の記録が可能である。
記録モードをエンドレスに設定しておけば、データ記録数が16,000個を超えると、
一番古いデータから上書きされ、記録が続く。
Pt-1000 センサーをデータロガーに接続し、温度表示値が日によって変化しないか
安定性と誤差を調べる。データロガーの表示・記録は0.1℃の分解能であるので、
0.01℃の桁の安定性を調べるには多数回の測定が必要となる。
標準温度計:
吉野計器製作所の二重管標準温度計(No.11744)を基準にしてPtセンサーと比較
する。標準温度計の温度目盛範囲=-30~50℃、全長=550mm、目盛間隔は0.1℃、
温度差10℃当たりの目盛長さ=42mm、検定表は0.01℃単位で記載されている。
標準温度計の目盛りはルーペで読み取る。その際、目とルーペと水銀柱と向かいの
壁面につけた印が水平線上に並ぶよう、ルーペを持った手を昇降可能の支持台に載せて、
水銀柱の温度目盛りを読みとる。0.1℃の目盛間隔から内挿して0.01℃単位まで
読み取る。数回の読み取りの精度は±0.01℃である。
注1:温度目盛の読み方
望遠鏡を使う場合(倍率20倍以上)、望遠鏡の筒を水平にしたまま支持台に取り付け
上下に移動させて温度目盛を読み取れば、楽に測定ができる。
Ptセンサーの防水は完全ではないので、空気中で比較検定
する。
空気中で行う場合は、
特別な注意が要る。室内であっても通風を良くし、放射除けを用いなければならない。
扇風機2台を使う。その目的は、室内気温と壁面温度のむらを小さくすることと、
センサーの追従性をよくして放射影響を小さくするためである。
仮に風速≒0.3m/sの状態で、室温と壁面平均温度の差が3℃あれば、誤差は0.3℃ほど
になる(放射影響により、標準温度計の指示温度がPtセンサーの表示温度に比べて
0.3℃ほど高くなる)。その理由は標準温度計とPtセンサーの感部の直径が違うこと
による。
注2:放射除けを付けない場合の誤差
標準温度計感部の直径=6.5mm、Ptセンサー感部の直径は=2.3mmである。
感部に当たる風速が2m/s、室内壁面の平均温度と室温の温度差=3℃の場合、
放射影響を計算してみる。室温20℃前後で温度差=3℃の場合の有効入力放射量
(R-σT4)=17W/m2である。放射影響によるセンサーの
温度上昇は有効入力放射量に比例する。近藤(1982)の「大気境界層の科学」の
図3.4は有効入力放射量=70W/m2の場合であり、この図の縦軸の値を
17/70=0.24倍すればよい。6.5mmに対する放射影響は0.9℃、2.3mmに対する
放射影響は0.5℃、その差=0.4℃となる。したがって、放射除けがない場合の誤差
は0.4℃×0.24=0.1℃となり。同様に風速=0.3m/sのときの誤差は0.3℃となる。
室内実験であっても無視できない誤差である。
標準温度計とPtセンサー(k01、k02)は風に垂直、互いに5mm離して並べる。
測定者の斜め前方に置いた扇風機から温度計感部に風を送り、標準温度計の指示値を
1分間隔で読み取る。斜め上向けにした他の扇風機で部屋の空気を撹拌する。
天井近くの気温と床面上の気温の差が1℃以内の条件のときに測定する。
Ptセンサーの追従性は標準温度計に比べて速いので、30秒間隔(表69.1)または20秒
間隔(表69.2)で記録した。温度計感部と測定者の間にはビニールシート
(高さ=0.9m、幅=0.9m)を張り、人体からの放射除けとし、また熱気が直接的
に感部に入らぬようにした。さらに温度計センサーを挟んで両側にはA4大のダン
ボール板で放射除けを取り付けた。風はダンボール板の間を通り抜ける。
部屋の中に人間(約100ワットの発熱体)がいるだけで室温は0.1~0.2℃程度は変化
する。それゆえ、標準温度計を読み取る姿勢でしばらく待機し、ほぼ平衡状態になって
から検定を始める。
Ptセンサー用のデータロガーの分解能(表示値)は0.1℃であるので、多数回の読取
を行う必要がある。標準温度計は1分間隔で20分間(0、1、2、・・・・20分)に21回
読取り、10分間の間をおいて、延べ60分間(63回の読み)を1シリーズとする。
この読みの平均値との比較からPtセンサーの器差が求められる。数回のシリーズの
平均値を結果とする。
データロガーの分解能が0.1℃のため、室内気温が仮に一定であれば、誤差は最大
±0.05℃となり正しい比較ができない。いっぽう室温変動が大きすぎると追従性の
関係から誤差が大きくなるので、20分間の気温変化の最大幅が0.5℃以内(気温変動
の標準偏差が0.11℃以下)の時間帯に行う。
正午過ぎ(気温20℃前後)、および日の出前の室温変化の小さいとき(気温10℃前後)
に行う。室温の微調節は窓のわずかな開閉により行う。
気温変動の標準偏差が0.11℃以上のときは誤差が大きくなるので統計には含めない
(適当な数値0.11℃に決めたのは後述の注6を参照)。
注3:室温変化が大きい時の例
室温の時間変化の大きいシリーズ#6では、20分間の室温変化の最大幅がそれぞれ
0.5℃、2.3℃、1.0℃(最大幅の平均=1.3℃、標準偏差σ=0.47℃)であり、
他に比べて誤差が大きく統計から除外した。そのほか、#11(σ=0.17℃)、
#18(σ=0.15℃)、#23(σ=0.13℃)、#31(σ=0.36℃)、#32(σ=0.37℃)
も除外した。
69.3 センサーとデータロガーの調整(アジャストメント)
データロガー「おんどとり」は測定値の調整(アジャストメント)をすれば、
調整された測定値が表示・記録される。アジャストメントは0.1℃単位で行う。
メーカによれば、調整は入力モジュール内にデジタルで設定されるゆえ、この調整の
不安定性は心配しなくてよいとのことである(本実験でも確認する)。
標準温度計と比較したところ、シリーズ#1~#5の平均値として、k02は0.11℃低め、
k01は0.10低めであることが分かった(表69.1)。そこで、入力モジュールを繋いだ
状態で+0.1℃のアジャストメントの設定を行った。
表69.1 調整前の比較測定、室温=12~23℃(多くは19~22℃)、平均室温=19.7℃
方法:標準温度計は1分間隔、Ptセンサーは30秒間隔で記録、
20分間比較し、間をおいて3回比較、延べ60分間の比較を1シリーズとする
k02-k01:Ptセンサーk02とk01の相対的な違い
補正値: 気温真値=気温表示値+補正値
気温変動: Ptセンサーによる20分間の気温変動標準偏差、20分間3回の平均値
シリーズ 平均気温 気温変動 k02-k01 k02補正値 k01補正値
℃ ℃ ℃ ℃ ℃
#1 22.3 0.03 -0.01 0.15 0.13
#2 21.9 0.07 -0.02 0.12 0.10
#3 20.4 0.05 0.00 0.08 0.08
#4 14.3 0.14 -0.01 0.10 0.10
#5 19.8 0.07 -0.01 0.11 0.10
平均 19.7 0.07 -0.01 0.11 0.10
表69.1の第4列目のk02とk01の違いは記録回数が1シリーズ当たり(20×2+1)×3
=123回で少なく、精度は低い、正確には次節を参照。また、シリーズ間で多少の違
いがあるのは、主に標準温度計とPtセンサーの時定数の違いから生じた読取回数の
少なさによるものである。しかし、アジャストメントの設定には0.1℃の精度で十分
である(詳細には、アジャストメント後に検定する)。
69.4 2個のセンサー間の相対的な器差
これ以下は、アジャストメント後の試験である。
2個のPt‐1000センサーの感部は束ねてアルミホイルで覆い、その上から銅線を巻き、
温度ムラが生じないようにした。
「おんどとり」の表示・記録値(分解能)は0.1℃である。それゆえ、温度0.01℃の
桁について精度よく知るには長時間の記録が必要である。20秒間隔で1~2日間、
延べ7日間の記録から相対的な器差を求めた。温度範囲ごとに相対的な器差の平均値
を計算した。
図69.1は気温と気温表示値の差(k02-k01)の関係である。1プロットは資料数
300~2000データ(平均個数は800データ)の平均値である。気温が低いときは
k02が0.01℃~0.03℃ほど高いが、17.5℃以上では逆になりk02が0.01℃~0.04℃ほど
低くなる。
この関係を補正すれば、相対誤差0.01℃以内の精度で数時間以上の長時間
平均気温を得ることができる。プロットのばらつきから判断すれば、相対的な器差の
精度は±0.003℃と見なされる。
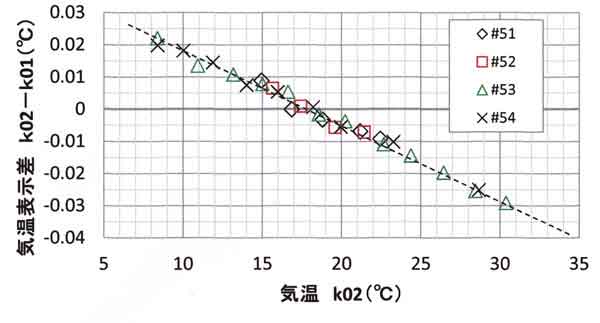
図69.2 2つの気温センサー間の相対誤差(k02-k01)の気温依存性。
図の破線は次の実験式で表される。縦軸をy, 横軸を x , 温度の単位を℃で表し、
y=ax+b ・・・・・・・(1)
a =-0.0023、 b=0.041
この式は後掲の図69.3の作成に用いる。
注4:気温センサー間の相対誤差の原因
図69.2に示したように、2つの気温センサーで温度係数に相対的な誤差がある原因
として、Pt素線の誤差、あるいは、データロガー(入力モジュールを含む)の誤差
が考えられる。どちらに原因があるかについて、別途の試験を行えば解決
できる(付録)。
なお、データロガー「おんどとり」TR-55i-Ptの取扱説明書によれば、このデータ
ロガーの精度は±0.3℃(10~40℃範囲)となっており、メーカに改善を要求する
わけではない。
注5:分解能0.01℃のデータロガーを用いるときの精度
デルタオーム社製で、精度0.01℃、分解能0.01℃のRTD温度計(形式HD2107.2)
(89,000円)がある。問い合わせたところ、これはデータロガー本体(67,000円)
の精度であり、温度プローブ(22,000円)の精度(±0.25℃)が実際の精度になる
とのことである(鶴賀電機による)。
条件の厳しい野外観測では、とくに放射の影響が大きく、不完全な通風装置を用いた
場合、晴天日中は実際よりも高い気温が観測される。
69.5 標準温度計による検定
標準温度計は1分間隔、Ptセンサーは20秒間隔で記録し、20分間比較し、間をおいて
3回の比較、延べ60分間の測定を1シリーズとする。
エアコンによる室内温度の調整を行った場合、気温変動の幅を小さくすることが難
しい(注6)。ここではエアコンを使わない時の10℃前後と20℃前後のみについて
検定を行った(表69.2)。
表69.2 標準温度計によるPt-1000センサーの検定(単位:℃)
気温変動: Ptセンサーによる20秒間隔で記録した20分間の気温変動標準偏差、
その3回の平均値
k02-k01:Ptセンサーk02とk01の相対的な違い
補正値: 気温真値=気温表示値+補正値
シリーズ 平均気温 気温変動 k02-k01 k02補正値 k01補正値
#07 18.8 0.08 -0.01 -0.01 -0.02
#08 18.3 0.08 0.00 0.00 -0.01
#09 21.1 0.09 -0.01 0.00 0.00
#10 20.1 0.06 -0.01 -0.01 -0.02
#21 19.4 0.06 0.00 -0.01 -0.01
#22 20.3 0.11 0.00 -0.01 -0.01
#24 20.6 0.05 -0.01 0.01 0.00
平均 19.8 0.074 -0.006 -0.003 -0.008
#12 12.5 0.08 0.01 0.01 0.02
#13 10.3 0.02 0.01 ‐0.02 ‐0.01
#14 11.3 0.07 0.01 0.01 0.02
#15 11.8 0.09 0.01 0.02 0.04
#16 8.9 0.11 0.02 ‐0.03 ‐0.01
#17 11.2 0.09 0.01 ‐0.01 0.01
#19 10.8 0.05 0.02 0.01 0.03
平均 11.0 0.070 0.014 0.000 0.014
注6:誤差と必要な読取回数
気温変動が仮にランダムの場合、読み取りの回数を n としたとき、気温変動の標準
偏差σと誤差δTは次の関係式で表される。
δT=σ/√n ・・・・・・・(2)
希望する精度をδT=0.01℃、変動の標準偏差をσ=0.1℃とすれば、n=100が
必要である。この目安に基づいて本章では1シリーズの標準温度計の読取回数を
n=63回とし、数シリーズの平均値を検定の結果としてきた。
ところがエアコンを使って室温調整を行うとσ=0.4℃程度となり、必要な読取回数
はn=1600となる。これは1シリーズ当たり延べ1600回(延べ約27時間)の読取が必要
となり現実的でなくなる。エアコンの調整により室温30℃前後の試験を2回行った
ところ、σ=0.36℃(#31)、0.37℃(#32)となり、必要な精度でPtセンサーの
検定を行うことは難しいと判断した。
検定結果(表69.2)と、2個のセンサー間の相対的な器差の関係(図69.2)を組み
合わせることによって、k02とk01の器差補正を求めた。その結果を次節で示す。
69.6 Pt-1000センサーの補正図
前々章と前章によって2つのPt-1000センサー(k02、k01)の相対的な器差と絶対的
な検定が行われた。相対的な器差は数日間の比較(データ総数=23,644)から得た
もので精度がよく±0.003℃である(図69.2、式1)。
絶対的な検定は標準温度計との比較によって行われたもので、読取精度及び検定書に
示された補正値は共に±0.01℃、読取回数は63回×7(シリーズ)=441回、延べ読取
回数は441回×2(温度)=882回、総合的な精度は±0.01℃である。
表69.2において、平均温度19.8℃(シリーズ#7~#10、#21~#24)は平均
温度11.0℃(シリーズ#12~#19)の場合に比べてばらつきが小さいので、前者に
重みをおく。
図69.3は、以上のことを考慮して求めたPt-1000センサーの補正値の温度依存性である。
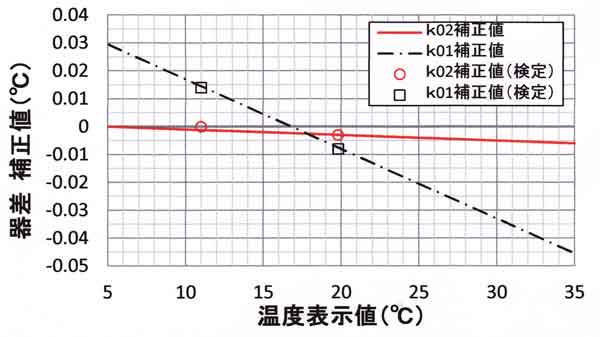
図69.3 2つのPt-1000センサーk02(赤)とk01(黒)の器差補正と気温との関係。
プロットは標準温度計による絶対検定、実線と鎖線は相対的な器差(図69.2)を考慮
した関係である。
k02とk01をそれぞれの温度表示値として、温度真値(℃)は次式によって求める。
k02真値=k02+k02補正値、k02補正値=-0.0002×k02+0.001・・(3a)
k01真値=k01+k01補正値、k01補正値=-0.0025×k01+0.042・・(3b)
したがって、PCでデータ処理する場合の式は、
○ k02真値=0.9998×k02+0.001・・・・・(4a)
○ k01真値=0.9975×k01+0.042・・・・・(4b)
k02センサーは気温が5℃以上の高温時に、k01センサーは17℃以上の高温時に高めに
表示されるので、補正値はマイナスになっている。
精度については、標準温度計に添付された検定書の精度は0.01℃であり、読取りの精度
も±0.01℃であるので、絶対値の精度は±0.01℃である。また、2本のPt-1000センサー
の相対的な器差の精度は±0.003℃である。したがって、2つの地点(露場)の気温差
の時間平均値の観測では、Pt-1000センサー(k02、k01)を用いることが望ましい。
69.7 まとめ
2組のPt-1000オームの温度センサーとデータロガー「おんどとり」(TR-55i-Pt)を
用いて相対的な器差を求め、標準温度計によって検定した。今回のPtセンサーでは、
0.1℃の調整(アジャストメント)を行った。1か月間の試験の結果、Pt-1000センサー
の安定性はよいことがわかった。
(1)検定結果に基づき、気温指示値に器差補正を行えば精度よく気温が求められる。
(2)データロガーの分解能は0.1℃であるが、数時間以上の長時間の平均気温を
求めるとき(サンプリングの資料数>100)、絶対的な誤差は±0.01℃である。
(3)同様に数時間以上の長時間の平均気温の観測では(サンプリングの資料数>数百
個)、2つのPt-1000センサー間の相対的な誤差は±0.003℃である。
本章での結果はPt-1000センサーとデータロガーの精度であり、野外での気温観測
では、放射影響を受けるので、完全な通風筒を用いる必要がある。その場合の誤差
については別章で述べる予定である。
付録1 Ptセンサーとデータロガーの組み合わせを変えた試験
図69.2または図69.3に示されるように、Pt-1000センサー(k02, k01)の相対的な器差
は5~35℃範囲において、±0.04℃ほどの違いがある。注意すべきは温度係数の違い
である。この原因は、Pt-抵抗体にあるのかデータロガー(入力モジュールを含む)
にあるのかを知っておきたい。
そこで、Ptセンサーとデータロガーの組み合わせを変えて、20秒間隔で24時間、
延べ2日間(#62、#63)を記録した。
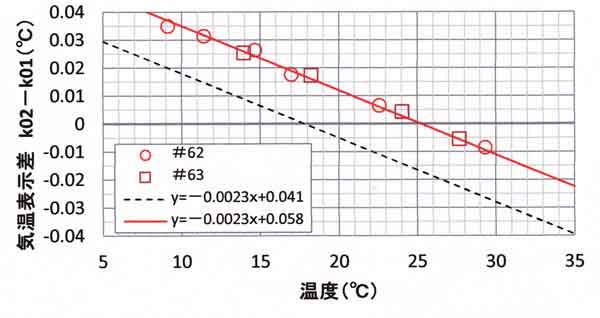
図69.4 データロガーとPtセンサーの組み合わせを変えたときの、相対的な表示温度
の差の気温依存性。
図69.4は図69.2と同じ関係であるが、データロガー(入力モジュール含む)の表示
温度の差(k02-k01)を縦軸にとってある。縦軸に表した記号は次の通りである。
k02・・・・データロガーk02、Ptセンサーk01
k01・・・・データロガーk01、Ptセンサーk02
プロットは実験結果である。破線は正規の組み合わせの図69.2の破線
(k02はデータロガーとPtセンサーともにk02、k01はデータロガーとPtセンサー
ともにk01)と同じである。
黒破線(正規の組み合わせ):y=-0.0023x+0.041 ・・・・・(5)
赤実線(Ptセンサのみ交換):y=-0.0023x+0.058 ・・・・・(6)
k02 と k01 の気温に対する勾配(温度係数)における差はなく同じ勾配である。
Ptセンサーのみ交換した場合、縦軸が0.017℃大きいほうへずれている。
これは、
2つのデータロガー(入力モジュール含む)の示す表示値の温度係数が異なることで、
温度30℃の幅で0.07℃の差がある。データロガー本体は記録装置であるので、
入力モジュールの相対的な誤差=0.23%(=0.07℃/30℃)
一方、縦軸のズレは Pt センサーの電気抵抗の相対的な違いによるものである。
白金の電気抵抗1000オームは温度差100℃当たり40オームの差であるので、
相対的な差 0.017℃ は0.068オームの差に相当する。したがって、
Pt センサーの相対的な誤差=0.0068%(=0.068オーム/1000オーム)
今回作っていただいた Pt-1000センサーは、クラスBの精度と聞いていたが、
入手した2つの Pt-センサーの差は筆者が予想していた差よりも小さかった。
付録2 Ptセンサーとデータロガーの組み合わせを元に戻した試験
69.2節で述べたように、昔のことだが、野外の厳しい条件下でPt-100オームの素子の
接続部における接触抵抗のわずかな違いで気温表示値にずれが生じることがあった。
その心配から今回はPt-1000オームの素子を使うことにしたわけである。
抵抗体の素子を外したのち、再び接続した場合、気温表示値が変らないか?
付録1の試験後、再び元の接続に変えたとき、2つのPt-1000の気温表示差も元の値に
厳密に戻っているかを試験した。
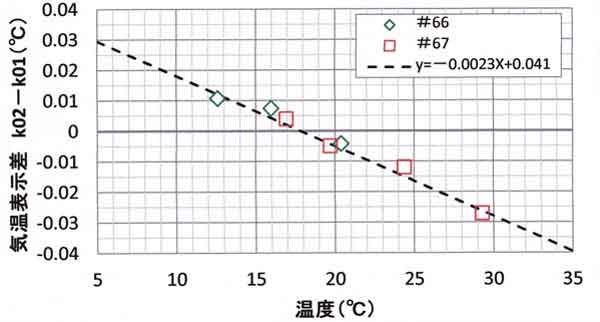
図69.5 Ptセンサーの組み合わせを元の接続に戻したときの、相対的な気温表示
の差の気温依存性。
図69.5に示すように、プロットのばらつきの幅(0.002℃)の範囲内で、気温表示差は
破線(最初に試験した図69.2の破線)と同じ、つまり、接続を元通りに直した後も
不変であることがわかる。ただし、これは室内における試験である。
付録3 他形式の「おんどとり」の検定
「おんどとり」の他の形式 RTR-52 の2つについて検定する。それらを NDA04
(略称: A04)および NDA11(略称: A11)と名づける。
この形式はデータロガーの外付けの温度素子(サーミスタ)から成り、その外径は
2mmである。
検定方法は次の通りである。
白金温度素子 k01 k02 の間にサーミスタ温度素子 A04 A11 を挟み、温度むらが少なく
なるようにアルミホイルで被い、さらに上から銅線を巻く。4つのセンサーは平板状の
形状となる。
これに扇風機で風を送り、k01 と k02 の平均値を基準の真値として比較検定する。
記録は20秒間隔とし、約24時間または約48時間を1シリーズとする。Ptセンサーの
検定と同じく、もう一つの扇風機で室内空気を攪拌し、温度むらを少なくした。
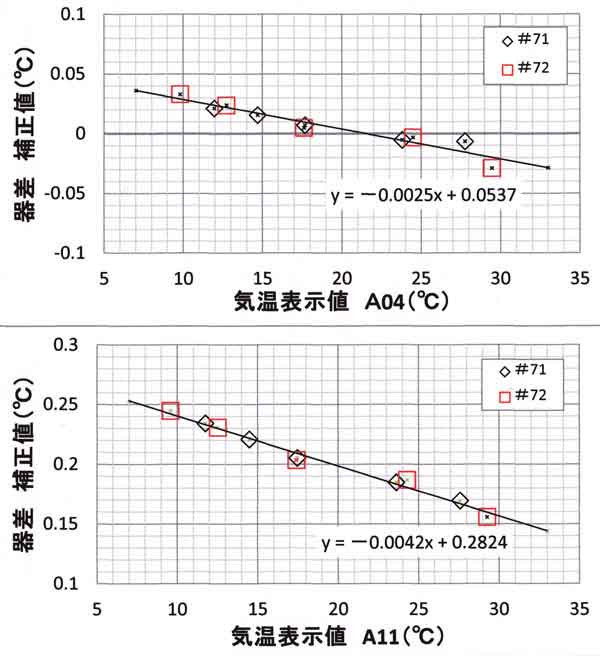
図69.6 形式RTR-52 の「おんどとり」のA04とA11の器差補正と気温の関係。
上図はA04、下図はA11についての関係。
図69.6は検定の結果である。下図に示す A11 は他に比べて約0.2℃低く表示される。
それゆえ、全温度範囲で補正値はプラスである。
A04 と A11 をそれぞれの気温表示値とすれば、気温真値(℃)は次式によって求める。
A04真値=A04+A04補正値、A04補正値=-0.0025×A04+0.0537・・(7a)
A11真値=A11+A11補正値、A11補正値=-0.0042×A11+0.2824・・(7b)
あるいは、PC でデータ処理する場合の次式により真値を求める。
○ A04真値=0.9975×A04+0.0537・・・・・(8a)
○ A11真値=0.9958×A11+0.2824・・・・・ (8b)
参考文献
近藤純正、1982:大気境界層の科学.東京堂出版、pp. 219.
近藤純正,2010:日本における温暖化と気温の正確な観測.伝熱,Vol.49,
No.208,58-67.
近藤純正、2011:日本の都市における熱汚染量の経年変化.気象研究ノート、
224号、25―56.