![]() 回路図
回路図
ガンローラ―受信機基板を利用する事が出来ないので同サイズのユニバーサル基板にモータードライバ6個と三端子レギュレータ及びマイコンを実装します。
モータードライバICはROHMのBD6231Fです。フルブリッジで36V耐圧、最大定格電流は1Aです。
コントロール端子入力電圧は2V以上なのでマイコンの出力を直接接続して制御する事が出来ます。
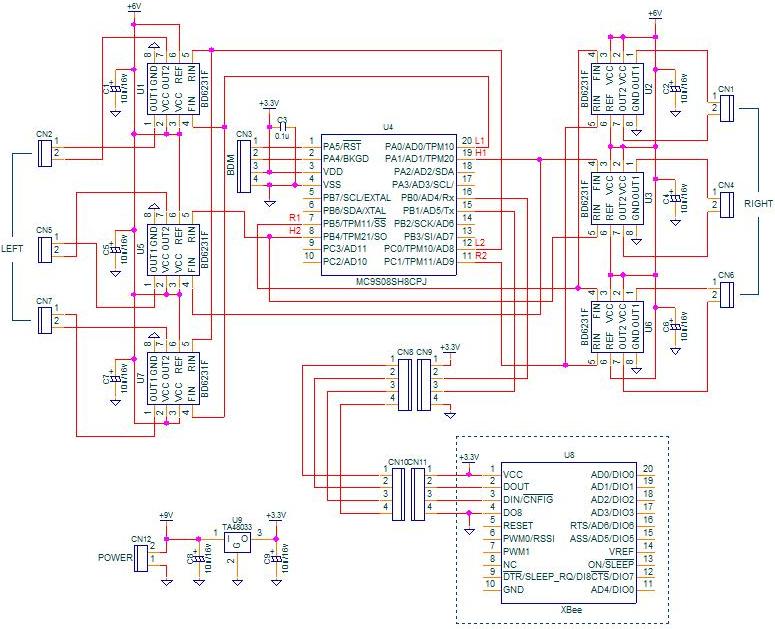
マイコンはMC9S08SH8です。マイコンを直接モータードライバICと接続するだけなので周辺部品は必要ないようです。
モータードライバは下表のようにFIN、RINで制御する事が出来ます。停止時はFIN,RINともHiとして、正転時はRIN側をPWMで制御します。
Lowにする期間が長い程、モーターの回転が速くなります。
| FIN | RIN | OUT1 | OUT2 | 動作 |
| L | L | Hi-Z | Hi-Z | スタンバイ(空転) |
| H | L | H | L | 正転(OUT1→OUT2) |
| L | H | L | H | 逆転(OUT2→OUT1) |
| H | H | L | L | ブレーキ(停止) |
右側の正逆転と左側の正逆転で4つのPWMを接続してしまうと横移動用のPWM出力が不足してしまいます。
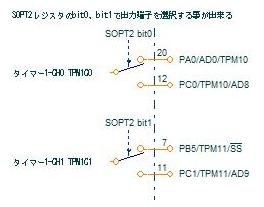
S08SHマイコンにはタイマーが2個あり、各タイマーをPWMで使用する場合、周期は同じでパルス幅の違う2つのチャンネルがあります。
タイマー1(ch0,ch1)出力端子は2か所あり、SOPT2レジスタで選択できるようになっています。今回はこのレジスタを使って、タイマー1出力端子を切り替え、FIN側をPWM出力にしたり
、RIN側をPWM出力にしたりする事でPWM出力の数を6個にします。これで外部に切り替え回路を増やす必要がありません。
XBEEは電源とGND送信と受信の4本のみ使用するので、RFモジュールとして別ケースに入れます。こうすれば使い回しができるのでコスト面で有利です。
また、アンテナを良い位置に配置できる利点もあります。


