京商のガンローラーという全方位移動型6輪走行R/Cがテクノロジアで¥3,000で販売されていたので購入しました。
ラジコンで前進、後退、右旋回、左旋回、右平行移動、左平行移動、回転など自由自在に走行する事が出来ます。
残念ながら操作はボタンによるON/OFFなので速度を自由にコントロールする事はできません。
そこでフルプロポーショナル送信機で、このガンローラーを制御できる受信機を製作します。
 写真1
写真1
まずはガンローラーを分析する為に解体して行きましょう。底面の4本のタッピングビスをはずし、ボディーを開くと写真2のように6本の車輪ユニットと基板が出てきます。
 写真2
写真2
写真3は中央に配置された受信基板です。部品面(左)のPTというロゴの入った20pin DIP ICはPT8A974Lという8方向リモートコントローラICです。
三端子レギュレータ LP2950 3.0Vでコントローラ用の電源としています。半田面の10pinの6個のICは三洋電機のモータードライバーLB1638でHブリッジICです。
残念ながらこのモータードライバーはPWMによるコントロールはできませんでした。
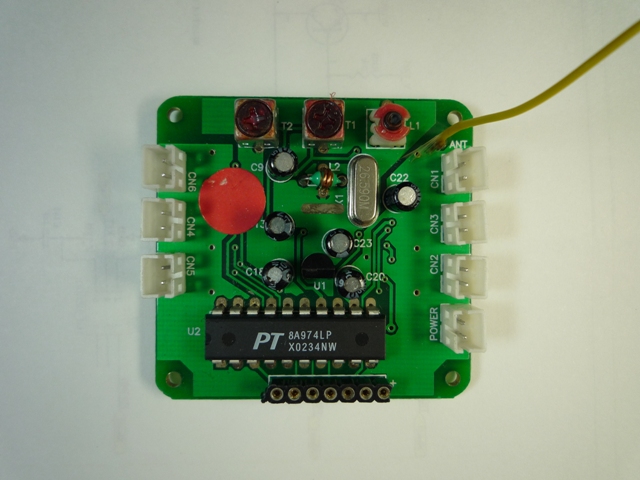
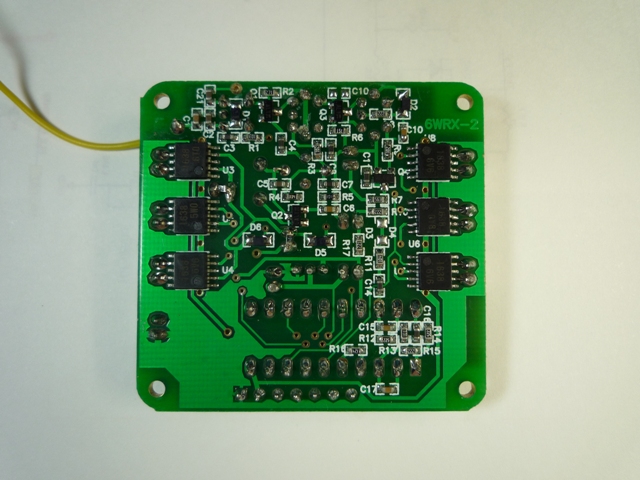 写真3
写真3
ガンローラ―の最大の特長は車輪にあります。写真4のように小さな車輪が横向きに沢山付いています。これにより水平方向へも移動する事が可能になっています。
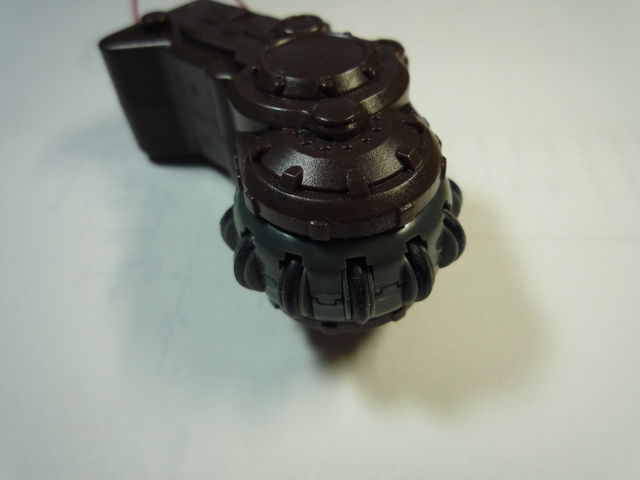 写真4
写真4
脚部を分解するとモーターと減速ギアの組み合わせになっています。モーターは9Vで200mA程度、モーターの回転を抑止すると1.2Aの電流が流れます。
モータードライバーLB1638の絶対最大定格は1Aとなっていますので車輪が停止するような過負荷はモータードライバーの定格を超える事になります。
 写真5
写真5
秋月電子で販売されているフルブリッジドライバIC BD6231Fは最大定格2Aで20kHzから100kHzのPWM制御が可能です。このドライバーとフリースケールのMC9S08SH8を使用して三方向モーター制御するアンプ付き受信機を製作します。RFモジュールは勿論XBEEシリーズ1を使用します。

