記事一覧 > この頁
デジタルカメラのノイズ測定・その四
「デジタルカメラのノイズ測定」では、
1フレームで減算したため精度にやや問題がある。
目安としてはこれでも良いのだが、高感度側で誤差が大きくなっているので、もう少し精度を上げたい。
また固定パターンノイズも測りたかったので、改めて測定してみることにした。
【方法】
ISO100〜6400までの間、1EV毎にダークフレームを101ショット撮影する。
そのうち100フレームをスタックしてダーク減算を行う。
スタックした画像のσを測定することにより、演算誤差1/10以下の精度で固定パターンノイズを把握することができる。
更にその画像を使って減算することで、より正確な読み出し回路ノイズがわかる。
- [手順]
- カメラ(Nikon D7000)を冷蔵庫内に収納し、温度順応後に撮影 (露出時間1秒, インターバル5秒程度)
- RStackerで画像をスタックし、マスターダークを作成
- RStackerでダーク減算
- dcrawの-Dオプションで2と3の画像の輝度情報を抽出 (dcraw -v -o 0 -D -4 -T Filename)
- ImageJで4の結果を読み取り
【結果】
[表1]
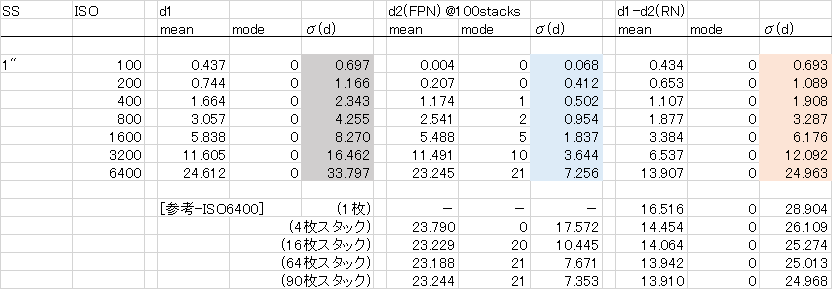 (画像をクリックで拡大)
(画像をクリックで拡大)
- d2のσ:固定パターンノイズ
- d1-d2のσ:読み出し回路ノイズ
- [参考]の箇所はISO6400のケース
[表2]
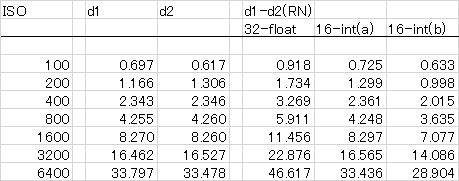 (画像をクリックで拡大)
(画像をクリックで拡大)
- ダーク1フレームで減算
- 32-float
- 16-int(a)
- 16-int(b)
【まとめ】
- ダーク減算をすると計算上は「(d1σ^2+d2σ^2)^0.5」ということになるが、
結果をRAWファイル(符号無し整数)に書き戻すため、実際にはこのような結果にならない。
ダークフレームの演算時の動作は表2とここを参照。
- マスターダークは4フレーム程度あれば実用上問題ない。
初出:2019-07-24
(C) YamD