▼STEP1
- dcrawで輝度のみ調整して現像
- dcraw -v -t 0 -b 1.0 -o 0 -6 -T (FileName)
- DeepSkyStackerで全コマスタック
- 事後の検証のため最初のファイルを基準フレームとして指定
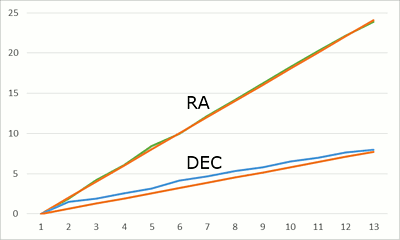
※最初と最後のフレームをプレートソルビングすると、
赤経141秒角, 赤緯41秒角のズレとなる。
DeepSkyStackerのログでは、赤経131秒角, 赤緯44秒角のズレとなるが、
これは像面上のズレであるので、プレートソルビングの結果に基づくものとした。
下記の「付記1」の通り、概ね線形にズレているので、問題無いと判断した。
[撮影区間の始点と終点の恒星位置]
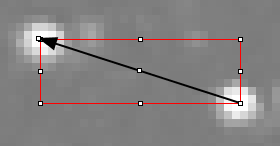
[同上アニメーションGIF] https://i.imgur.com/4RPMRTA.gif
※撮影画像を検証してみると以下のようになる。
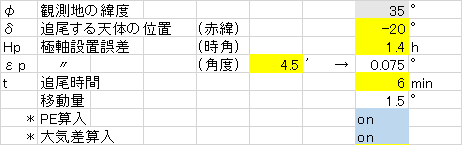
[表1] - 条件
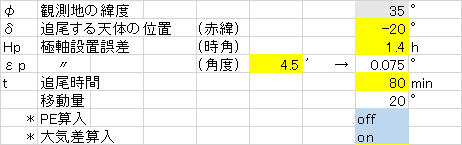
[表2] - 試算

設置誤差を時角1.4h方向に4.5分角程度と推定した。
▼STEP2
画像ファイルから星像重心のズレを測定する。
- ImageJを使用し下記の要領で測定する。
ImageJの操作については、赤道儀のピリオディックモーション測定の「計測 - 2.ImageJ」の項目も参照のこと。
- tiffをfitsに変換/保存し(File > Save As > FITS)改めて読み込み
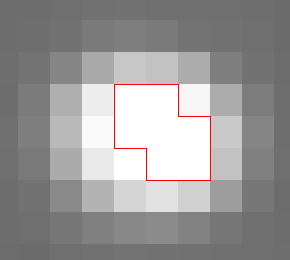
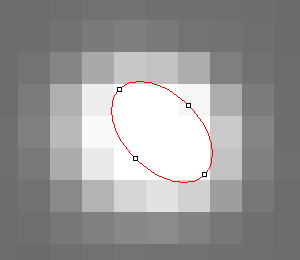
- 強拡大して適当な星像の重心部分を Tools > Wand tool でクリック
その際にカーソルがポイントしているセルの輝度を確認し、最も高輝度の箇所をクリック[重心選択]
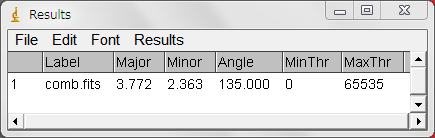
- Analyze > Set Measurements を Fit Ellipse にセット
- Analyze > Measure (ctrl+M)
楕円の長辺・短辺・角度を測定
[重心測定]
 [Angleの方向]重心部分が選択された状態で、Edit > Selection > Fit Ellipse とすれば楕円近似の状態を確認可能
[Angleの方向]重心部分が選択された状態で、Edit > Selection > Fit Ellipse とすれば楕円近似の状態を確認可能
 [楕円近似]
[楕円近似]
- 誤差をできるだけ排除するために、複数の恒星を測定したいが、上記のように個別に処理していくと手間である。
そこで下記の手順で行うことにした。
Results の「Major - Minor」を重心のズレ、すなわち追尾誤差とみなした。
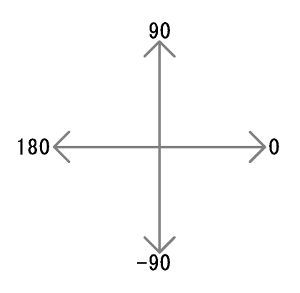
Angle の値はズレの方向となる。
- Edit > Invert で輝度反転
- Adjust > Threshold(Auto) で閾値設定
- Tools > Rectangular selections で画像中央の一定範囲を矩形選択 → 1000px * 1000px程度
- Analyze > Analyze Particles
- Sizeの調整 → 10-50程度に設定
- 小の値はゴミやホットピクセルを除外するため
- 大の方は値が大きいと、微恒星が連結された状態のものまで選択されてしまうことがあるので、 それを除外するため
- Circularityの調整 → 0.50-1.00に設定
- 楕円率(Major÷Minor)が4を超える辺りまで対象
パッと見てズレているのがわかるようなケースは測定対象外
- 楕円率(Major÷Minor)が4を超える辺りまで対象
- Exclude on Edges → チェック
- 選択範囲の境界に接する測定対象を無視
チェックを入れていないと対象が境界線で分割される
- 選択範囲の境界に接する測定対象を無視
- Sizeの調整 → 10-50程度に設定
- ROI Manager > Measure
- Results > File > Save As
- 出力ファイルを元にExcel等で分析してみる。
- 追尾誤差
ゼロと2σ以上の誤差を除外して平均値を計算し中央値と比べる。 近似するようなら問題無い。 - 角度
中央値を計算しズレ方向を見てみる。
- 追尾誤差
上記の方法で処理した結果、平均4.1秒角、標準偏差2秒角となった。
▼STEP3
最初に計算したエクセルファイルの追尾時間を、1ショットのものに変えてみる。 ピリオディックモーションと大気差を加味し、STEP2の計測結果と比較する。
[表3] - 条件
[表4] - 試算
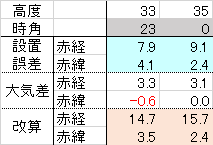
STEP2の計算値と大きな違いが無いことを確認した。
撮影には公称PE±3.5秒角(実測では3秒角)の機材を使用した。
1枚あたりの露出時間が6分間なので、PEはP-Pで6〜7秒角となる。
これに極軸設置誤差、大気差を加味すると表4のようになる。
いっぽう光学系の焦点距離と、撮像素子から計算した許容限度は、11秒角程度である。
差し引きするとSTEP2と近似するが、目視ではシーイングサイズ分はボケて目立たなくなっているはず。
撮影画像からはこれ以上判別できない。
今回は敢えてSTEP3までの作業を行ったが、通常はSTEP1のみで推定して問題無いものと思われる。
▼備考
- 今回の検証では前述の(2)赤経軸と赤緯軸の直交誤差, (3)赤経軸と鏡筒の平行誤差, (6)機材誤差等は 考慮していないが、(3)が発生していると非常に厄介である。
- ショット毎に大きなバラツキがあるようなら、(6)を見直してみること。


{kind=link}