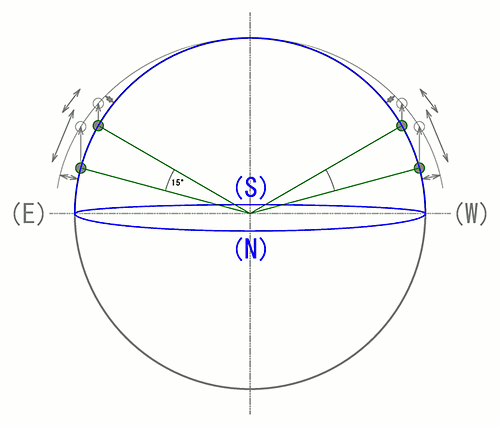
- 撿岦偒惓棫憸乮杒偑忋偺幨栰乯
- 埵抲偼杒堒35亱愒堒35亱曈傝傪憐掕
- 敀娵偼尒偐偗偺峆惎埵抲
- 崟娵偼恀偺峆惎埵抲
戝婥偺孅愜嶌梡偵傛傝丄嬌幉愝抲偺嵺偵堦掕偺岆嵎偑惗偠偰偟傑偄丄捛旜惛搙偵塭嬁偑弌偰偔傞偲偄偆掱搙偺擣幆偟偐側偐偭偨丅 偮傑傝嶣塭懳徾偺愒堒傗帪妏偵偍偄偰丄偦傟偑偳偺傛偆偵曄壔偡傞偺偐棟夝偑晄廫暘偱偁偭偨丅 偦偙偱嬶懱揑偵寁嶼偟偰傒傞偙偲偵偟偨丅
仭戝婥嵎仴捛旜僄儔乕偺掕検揑昡壙
戝婥嵎偺妏搙R(z)偼揤捀嫍棧z偱寛傑傝丄埲壓偺幚尡幃偱傕幚梡揑側抣偑暯嬒抣偲偟偰昞尰偱偒傞丅
丂R(z) = 58".3 tan z
R(z)偺愒宱曽岦偺惉暘儮兛丄愒堒曽岦偺惉暘儮兟丄帪妏曽岦偺惉暘儮儱偼師幃偱偁傜傢偝傟傞丅
丂儮兛 = 亅R(z) sin兣 sec兟丂儮兟 = R(z) cos兣丂儮儱 = 亅儮兛
幃拞偺兟偼揤懱偺愒堒丄兣偼揤懱偑揤捀偲嬌偵挘傞妏偱偁傞丅
仭戝婥嵎傪曗惓偡傞偨傔偺儌乕僞乕僪儔僀僽偺僗僺乕僪愝掕抣
揤懱偺尒偐偗偺擔廃塣摦偵傛傞懍偝偼丄戝婥嵎偵傛偭偰楢懕揑側曄摦傪傒偣傞丅 戝婥嵎偵揔摉側暯嬒抣傪嵦梡偡傞偲丄戝婥嵎偵傛傞愒宱曽岦偺捛旜岆嵎傪偒傢傔偰彫偝偔偱偒傞嬌幉偺塣揮懍搙(昩/夞揮)偺抣偑丄 娤應偡傞揤懱偺愒堒偲帪妏丄娤應抧偺堒搙偐傜嶼弌偱偒傞丅
丂86164.09亄24亊{cos冇/cos兟 [cos冇 cos兟亄sin冇 sin兟 cos儱/(sin冇 sin兟亄cos冇 cos兟 cos儱)2]亅cot冇 tan兟 cos儱}
丂峆惎帪塣揮=86164.09昩/夞揮丂冇丗娤應抧偺堒搙丂兟丗揤懱偺愒堒丂儱丗揤懱偺帪妏
| 儱 | 捛旜偡傞揤懱偺埵抲(帪妏) | 20h |
| 兟 | 乂(愒堒) | 0亱 |
| 冇 | 娤應抧偺堒搙 | 35亱 |
| t | 捛旜帪娫 | 600昩 |
(幃1)乽揤暥擭娪乿偺悢幃
(幃2)乽揤暥擭娪乿偲乽捛旜僄儔乕偺掕検揑昡壙乿偺悢幃偼摨撪梕
(幃3乣6)乽捛旜僄儔乕偺掕検揑昡壙乿偺悢幃
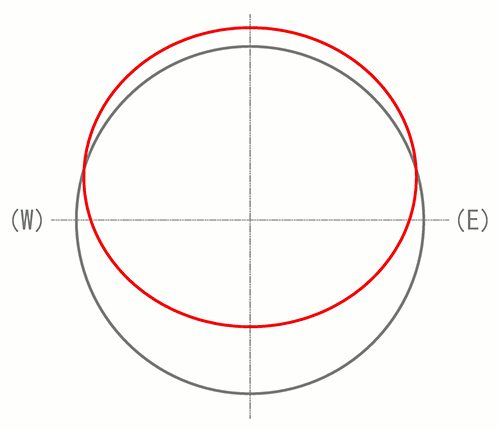
仸幃1偐傜嶼弌偟偨帪妏曽岦偺捛旜帪娫偁偨傝岆嵎偼丄忋嬻偱幃5偺抣偲槰棧偑惗偠偰偔傞丅
側偍掅嬻偱偼奣偹嬤帡偡傞丅