![]() 儊僀儞僾儘僌儔儉丗T_CONT.們
儊僀儞僾儘僌儔儉丗T_CONT.們
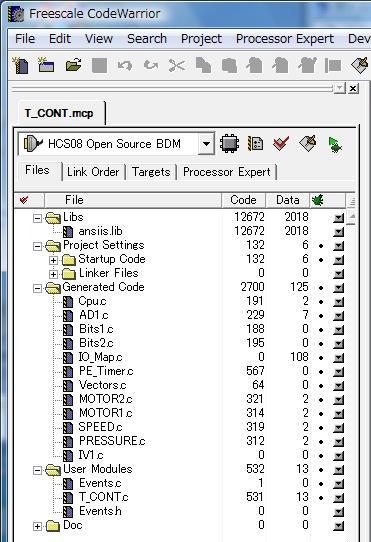
僾儘僙僢僒乕僄僉僗僷乕僩乮PE)偱愝掕偟偨寢壥丄壓恾偺條側僜乕僗僼傽僀儖偑惗惉偝傟傑偡丅弶婜愝掕偼慡偰姰椆偟偰偄傑偡偺偱MAIN娭悢偺娷傑傟偰偄傞T_CONT.們偺傒傪婰弎偟傑偡丅
亂愰尵晹亃
Types definition
崱傑偱巊偭偰偄偨char宆傗int宆側偳偺僨乕僞宆傪unsibned int偲彂偔偺偼挿偄偺偱word偲偡傞愰尵暥偱偡丅
MAS_CON丗儅僗僐儞VR傪AD曄姺偟偨寢壥傪奿擺偡傞儗僕僗僞偱偡丅
SPEED:儌乕僞乕偺夞揮悢傪惂屼偡傞儗僕僗僞偱偡丅
BREAK_CON:僽儗乕僉VR傪AD曄姺偟偨寢壥傪奿擺偡傞儗僕僗僞偱偡丅
PRESSURE:埑椡寁僒乕儃偺巜帵抣儗僕僗僞偱偡丅
ATCPOS丗 ATC僙儞僒乕斣崋儗僕僗僞偱偡丅
ATCFLG丗 ATC儌乕僪僼儔僌偱偡丅
STOPFLG丗掆巭壜擻僼儔僌偱偡丅
/* Types definition */
typedef unsigned char byte;
typedef unsigned int word;
typedef unsigned long dword;
typedef unsigned long dlong[2];
/***** 愰尵晹 *****/
word MAS_CON; 丂丂// 儅僗僐儞儗僶乕偺埵抲儗僕僗僞
word SPEED; 丂丂丂丂// 揹幵偺尰嵼懍搙儗僕僗僞
word BREAK_CON; // 僽儗乕僉儗僶乕偺埵抲儗僕僗僞
word BREAK; 丂丂丂// 揹幵偺尰嵼偺僽儗乕僉儗僕僗僞
word PRESSURE; // 埑椡寁抣儗僕僗僞
byte ATCPOS; 丂丂// ATC僙儞僒乕斣崋儗僕僗僞
byte ATCFLG; 丂丂// ATC儌乕僪僼儔僌
byte STOPFLG; 丂// 掆巭壜擻僼儔僌
亂ATC妱崬傒娭悢亃
PORTB偺棫壓傝偱妱崬傒偑敪惗偡傞偲丄偙偺娭悢偑屇傃弌偝傟傑偡丅妱崬傒僼儔僌傪僋儕傾偟偰丄偳偺億乕僩偑尨場偐偱ATCPOS乮ATC億僕僔儑儞乯傪愝掕偟傑偡丅
//*********************************************************
//* ATC妱崬傒娭悢
//*********************************************************
ISR(ATC) // PTB妱崬傒張棟
{
丂丂PTBSC_PTBACK = 1; // 妱崬傒僼儔僌偺僋儕傾
丂丂if(PTBD_PTBD0 == 0) ATCPOS = 1; // 僙儞僒乕1
丂丂if(PTBD_PTBD1 == 0) ATCPOS = 2; // 僙儞僒乕2
丂丂if(PTBD_PTBD2 == 0) ATCPOS = 3; // 僙儞僒乕3
}
亂ATC塣揮娭悢亃
娭悢柤偼ATCMODE偱偡丅偙偺娭悢偼ATC塣揮偺張棟傪峴偄傑偡丅
SPEED傕BREAK_CON傕MAS_CON傕0乣1023偺壜曄斖埻偱偡丅偙傟傜傪僾儘僌儔儉偱惂屼偟傑偡丅傑偢SPEED偑300埲忋偺応崌偼BREAK_CON傪800偲偟偰懍搙傪棊偲偟傑偡丅
SPEED偑300埲壓偵側偭偨傜僽儗乕僉傪夝彍偟丄儅僗僐儞傪140偵愝掕偟傑偡丅揹幵偼姷惈憱峴傪峴偄側偑傜彊乆偵懍搙偑掅壓偟丄SPEED偑140偵側偭偨帪揰偱掕懍搙憱峴偲側傝傑偡丅
SPEED偑300埲壓偱僙儞僒乕侾偑専弌偝傟傞偲ATCPOS偼1偲側傝丄SPEED偼彊峴塣揮懍搙偺120偲側傝丄掆巭壜擻僼儔僌傪僙僢僩偟偰ATCPOS偑2偵側傞傑偱堐帩偝傟傑偡丅
掆巭壜擻僼儔僌偑侾偱僙儞僒乕俀偑専弌偝傟傞偲ATCPOS偼2偲側傝丄SPEED傪0偲偟偰掆巭偟傑偡丅ATCPOS偑2偱SPEED偑0偺忬懺偼忔崀懸偪偲側傝俆昩娫掆幵偟偨屻丄帺摦塣揮廔椆偺偨傔丄ATC僼儔僌偲ATCPOS傪僋儕傾偟傑偡丅掆巭壜擻僼儔僌偑0偺応崌偼偦偺傑傑捠夁偟偰師偺墂偺僙儞僒乕傑偱憱峴偑堐帩偝傟傑偡丅
//*********************************************************
//* ATC塣揮娭悢
//*********************************************************
void ATCMODE(void)
{
丂丂int i;
/***** 懍搙300埲忋 *****/
丂丂if(SPEED >=300)
丂丂{
丂丂丂丂BREAK_CON = 800; 丂// 僽儗乕僉傪800
丂丂丂丂MAS_CON = 140; 丂丂// 儅僗僐儞傪140乮彊峴乯
丂丂}
/***** 懍搙300埲壓 *****/
丂丂if(SPEED < 300)
丂丂{
丂丂丂丂BREAK_CON = 100; // 僽儗乕僉夝彍
丂丂}
/***** 僙儞僒乕侾専弌乮懍搙300埲壓乯 *****/
丂丂if(ATCPOS == 1 & SPEED <= 300)
丂丂{
丂丂丂丂SPEED = 120; 丂丂丂丂丂丂// 彊峴塣揮
丂丂丂丂BREAK_CON = 100; 丂丂// 僽儗乕僉夝彍
丂丂丂丂ATCPOS = 0; 丂丂丂丂丂丂// 僙儞僒乕斣崋儗僕僗僞傪僋儕傾
丂丂丂丂STOPFLG = 1; 丂丂丂丂丂// 掆巭壜擻僼儔僌傪僙僢僩
丂丂}
/***** 忔崀懸偪 *****/
丂丂if(ATCPOS == 2 & SPEED == 0)
丂丂{
丂丂丂丂for(i=1;i<6;i++)
丂丂丂丂{
丂丂丂丂丂丂Cpu_Delay100US(10000);
丂丂丂丂}
/***** 帺摦塣揮廔椆 *****/
丂丂丂丂ATCFLG = 0; 丂丂丂丂// 帺摦塣揮僼儔僌傪僋儕傾
丂丂丂丂ATCPOS = 0; 丂丂丂丂// 僙儞僒乕斣崋僼儔僌傪僋儕傾
丂丂}
/***** 僙儞僒乕2専弌乮掆巭壜擻乯 *****/
丂丂if(ATCPOS == 2 & STOPFLG)
丂丂{
丂丂丂丂MAS_CON = 0; 丂丂丂// 儅僗僐儞傪掆巭埵抲偵愝掕
丂丂丂丂SPEED = 0; 丂丂丂丂丂// 掆巭
丂丂丂丂STOPFLG = 0; 丂丂丂// 掆巭壜擻僼儔僌僋儕傾
丂丂}
}
亂弶婜愝掕亃
TRIM愝掕偼偍撻愼傒偺撪憻僋儘僢僋僩儕儉偺愝掕偱偡丅弶婜愝掕偼億乕僩B妱崬傒梡偺愝掕偱偡丅
//*********************************************************
//* 儊僀儞娭悢
//*********************************************************
void main(void)
{
/* Write your local variable definition here */
/*** Processor Expert internal initialization. DON'T REMOVE THIS CODE!!! ***/
丂丂PE_low_level_init();
/*** End of Processor Expert internal initialization. ***/
/* Write your code here */
/* For example: for(;;) { } */
//*********************************************************
//* 弶婜愝掕
//*********************************************************
/***** TRIM愝掕 *****/
丂丂ICSTRM = 0x9E;
丂丂ICSSC_FTRIM = 1;
/***** 弶婜愝掕 *****/
丂丂PTBPS = 7; 丂丂丂丂丂丂丂// PORTB0乣PORT2傪妱崬傒梫場偵愝掕
丂丂PTBES = 0; 丂丂丂丂丂丂丂// 棫壓傝偱妱崬傒敪惗偵愝掕
丂丂PTBSC_PTBMOD = 0; // 妱崬傒偼僄僢僕偺傒専弌偵愝掕
丂丂PTBSC_PTBIE = 1; 丂丂// 妱崬傒嫋壜
丂丂ATCPOS = 0; 丂丂丂丂丂// ATC僙儞僒乕斣崋儗僕僗僞傪僋儕傾
亂儊僀儞儖乕僾亃
ATC帺摦塣揮僗僀僢僠偑墴偝傟偰偄傞偐僠僃僢僋偟丄墴偝傟偰偄傟偽ATCFLG乮ATC僼儔僌乯傪斀揮偟傑偡丅師偵ATC僼儔僌偵傛傝庤摦塣揮偐ATC塣揮偐偵暘婒偟傑偡丅ATC僼儔僌偑侾側傜偽ATC塣揮娭悢偵僕儍儞僾偟傑偡丅
儌乕僞乕惂屼PWM偺壜曄暆偼0乣20000丄SPEED儗僕僗僞偺抣偼0乣1023側偺偱SPEED儗僕僗僞偺抣傪20攞偟偰儌乕僞乕惂屼PWM偺僷儖僗暆傪壜曄偟傑偡丅
庤摦塣揮偺帪偼儅僗僐儞偲僽儗乕僉偺儃儕儏乕儉傪AD曄姺偟傑偡丅
SPEED偵懳偟偰MAS_CON偑戝偒偄偲SPEED傪僀儞僋儕儊儞僩偟偰壛懍偟傑偡丅MAS_CON偑SPEED傛傝彫偝偄帪偼SPEED偐傜BREAK偺抣傪尭嶼偟偰尭懍偟傑偡丅BREAK偼嵟掅抣偑侾側偺偱僽儗乕僉傪偐偗側偔偰傕彊乆偵尭懍偟傑偡丅乮姷惈憱峴乯BREAK偺抣偑戝偒偄偲偦傟偩偗尭懍棪偑忋偑傝憗偔懍搙偑掅壓偟傑偡丅
埑椡寁昞帵偼BREAK_CON偺壜曄斖埻0偐傜1023傪僒乕儃偺摦嶌斖埻2.375倣S乣1.53倣S偵曄姺偟偰弌椡偟偰偄傑偡丅僒乕儃偵傛傝壜曄偱偒傞斖埻偑堘偄傑偡偺偱拲堄偟偰偔偩偝偄丅
懍搙寁昞帵偼SPEED偺壜曄帟偵0乣1023傪僒乕儃偺摦嶌斖埻2.375mS乣0.67mS偵曄姺偟偰弌椡偟偰偄傑偡丅
僽儗乕僉偺AD曄姺偡傞帪偵100傪壛嶼偡傞偺偼丄AD曄姺抣偑100傪挻偊傞傑偱BREAK抣偑姷惈憱峴帪偲摨偠1偵側偭偰偟傑偆偺偱僽儗乕僉傪憖嶌偟偰傕懍搙偑掅壓偟側偄帠傪杊偄偱偄傑偡丅
儃儕儏乕儉抣偺僆僼僙僢僩偲巚偊偽椙偄偱偟傚偆丅
//*********************************************************
//* 儊僀儞儖乕僾
//*********************************************************
丂丂for(;;)
丂丂{
/***** 帺摦塣揮僗僀僢僠僠僃僢僋 *****/
丂丂丂丂if(PTBD_PTBD6 == 0)
丂丂丂丂{
丂丂丂丂丂丂Cpu_Delay100US(100);
丂丂丂丂丂丂if(PTBD_PTBD6 == 0) ATCFLG = !ATCFLG;
丂丂丂丂丂丂while(!PTBD_PTBD6){}
丂丂丂丂}
/***** ATC塣揮/庤摦塣揮暘婒 *****/
丂丂丂丂if(ATCFLG == 1)
丂丂丂丂{
丂丂丂丂丂丂ATCMODE(); // 帺摦塣揮
丂丂丂丂}
丂丂丂丂else
丂丂丂丂{
/***** 庤摦塣揮 *****/
丂丂丂丂丂丂STOPFLG = 0; // 掆巭壜擻僼儔僌僋儕傾
丂丂丂丂丂丂ATCPOS = 0; // 僙儞僒乕斣崋儗僕僗僞僋儕傾
丂丂丂丂丂丂ADCSC1 = 11; // AD曄姺僗僞乕僩
丂丂丂丂丂丂while (!ADCSC1_COCO); // AD曄姺廔椆懸偪
丂丂丂丂丂丂MAS_CON = ADCR; // 曄姺抣傪儗僕僗僞偵奿擺
丂丂丂丂丂丂Cpu_Delay100US(10);
丂丂丂丂丂丂ADCSC1 = 10; // AD曄姺僗僞乕僩
丂丂丂丂丂丂while (!ADCSC1_COCO); // AD曄姺廔椆懸偪
丂丂丂丂丂丂BREAK_CON = ADCR + 100; // 曄姺抣偵OFFSET傪晅偗偰儗僕僗僞偵奿擺
丂丂丂丂}
/***** 埑椡寁惂屼 *****/
丂丂丂丂PRESSURE = 9500-BREAK_CON*6; // 2.375mS乣1.53mS
丂丂丂丂TPM1C1V = PRESSURE; //
丂丂丂丂BREAK = (BREAK_CON / 100); // BREAK亖1乣11
/***** 懍搙惂屼 *****/
丂丂丂丂if(MAS_CON>SPEED) //
丂丂丂丂{
丂丂丂丂丂丂Cpu_Delay100US(200);
丂丂丂丂丂丂SPEED = SPEED + 1; // 壛懍
丂丂丂丂}
丂丂丂丂else
丂丂丂丂{
丂丂丂丂丂丂if(SPEED) // 懍搙偑0偱側偄
丂丂丂丂丂丂{
丂丂丂丂丂丂丂丂if(SPEED > BREAK) // 懍搙偑僽儗乕僉傛傝戝偒偄
丂丂丂丂丂丂丂丂{
丂丂丂丂丂丂丂丂丂丂SPEED = SPEED - BREAK; // 尭懍
丂丂丂丂丂丂丂丂}
丂丂丂丂丂丂丂丂else // 懍搙偑僽儗乕僉傛傝彫偝偄
丂丂丂丂丂丂丂丂{
丂丂丂丂丂丂丂丂丂丂SPEED = 0; // 掆巭
丂丂丂丂丂丂丂丂}
丂丂丂丂丂丂丂丂Cpu_Delay100US(1000);
丂丂丂丂丂丂}
丂丂丂丂}
/***** 懍搙寁惂屼 *****/
丂丂丂丂if(SPEED > 50)
丂丂丂丂{
丂丂丂丂丂丂TPM1C0V = 9500 - ((SPEED - 50) * 7); // 2.375mS乣0.67mS
丂丂丂丂}
丂丂丂丂else
丂丂丂丂{
丂丂丂丂丂丂TPM1C0V = 9500;
丂丂丂丂}
/***** 慄楬弌椡揹埑惂屼 *****/
丂丂丂丂if(PTBD_PTBD7) // 恑峴曽岦僗僀僢僠
丂丂丂丂{ //
丂丂丂丂丂丂TPM2C1V = 0; // SPEED 斾 僞僀儅乕抣
丂丂丂丂丂丂Cpu_Delay100US(1); // 掆巭 = 0 0% 0
丂丂丂丂丂丂TPM2C0V = SPEED * 20; // 慡懍 = 1023丂100% 20000
丂丂丂丂}
丂丂丂丂else
丂丂丂丂{
丂丂丂丂丂丂TPM2C0V = 0;
丂丂丂丂丂丂Cpu_Delay100US(1);
丂丂丂丂丂丂TPM2C1V = SPEED * 20;
丂丂丂丂}
丂丂}
/*** Don't write any code pass this line, or it will be deleted during code generation. ***/
/*** Processor Expert end of main routine. DON'T MODIFY THIS CODE!!! ***/
丂丂for(;;){}
/*** Processor Expert end of main routine. DON'T WRITE CODE BELOW!!! ***/
} /*** End of main routine. DO NOT MODIFY THIS TEXT!!! ***/
/* END T_CONT */


