![]() 夞楬恾
夞楬恾
埲壓偵夞楬恾傪帵偟傑偡丅BDM僐僱僋僞偼1楍4僺儞偺僺儞僿僢僟傪巊梡偟傑偡丅夞楬恾傪僋儕僢僋偡傞偲PDF僼傽僀儖傪僟僂儞儘乕僪偱偒傑偡丅
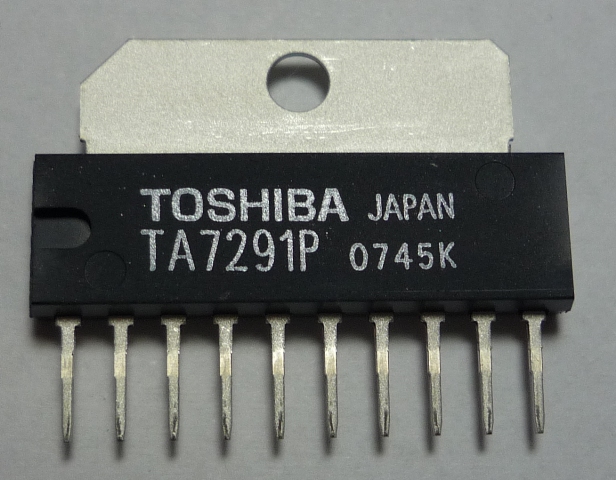
亂儌乕僞乕僪儔僀僶乕亃
U2丂TA7291P偑H僽儕僢僕儌乕僞乕僪儔僀僶乕偱偡丅
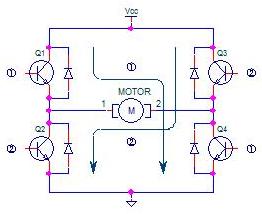
H僽儕僢僕偲偼壓恾偺傛偆偵儌乕僞乕傪拞怱偵夞楬偑H宆偵峔惉偝傟傞偨傔偱偡丅嘆傪惓揮丄嘇傪媡揮偲偡傞偲丄嘆偺帪偵偼Q1偲Q4偑ON偲側傝丄儌乕僞乕偺嵍偐傜塃偵揹棳偑棳傟偰惓夞揮偟傑偡丅
嘇偺帪偼Q2偲Q3偑ON偲側傝丄儌乕僞乕偺塃偐傜嵍偵揹棳偑棳傟偰媡夞揮偟傑偡丅
壓昞偺傛偆偵IN1,IN2偺H/L偱夞揮曽岦傗僽儗乕僉傪惂屼偱偒傑偡丅弌椡揹埑偼Ref抂巕偵傛傝惂屼偡傞帠偑弌棃傑偡丅弌椡揹棳1A乮暯嬒乯偱4.5V乣20V偱摦嶌偟傑偡丅
崱夞偼揹尮揹埑12V偱弌椡揹埑偼PWM惂屼偟傑偡偺偱Ref抂巕偼巊梡偟側偄偺偱3倠兌偱VS偵愙懕偟傑偡丅IN1,IN2抂巕偼L偑0.8V埲壓丄Hi偑3.5V埲忋偱偡偐傜儅僀僐儞偐傜捈愙愙懕偟傑偡丅
| 擖椡 | 弌椡 | 儌乕僪 | ||
| IN1 | IN2 | OUT1 | OUT2 | |
| 0 | 0 | 亣 | 亣 | 僗僩僢僾 |
| 1 | 0 | H | L | CW/CCW |
| 0 | 1 | L | H | CW/CCW |
| 1 | 1 | L | L | 僽儗乕僉 |
亂揹尮夞楬亃
嶰抂巕儗僊儏儗乕僞傪巊梡偟偨+5V揹尮傪2宯摑梡堄偟傑偟偨丅僒乕儃傪嬱摦偡傞応崌丄儌乕僞乕偺媡婲揹椡偑敪惗偟丄儅僀僐儞偺揹尮揹埑偑愨懳嵟戝掕奿傪挻偊傞帠傪杊偖偨傔偱偡丅
U4丂TA78L05F偑儅僀僐儞梡D+5V嶰抂巕儗僊儏儗乕僞偱偡丅嫋梕懝幐500倣W偱偡偐傜丄栺70倣A傑偱弌椡偱偒傑偡丅
U3丂TA7805S偼僒乕儃梡+5V嶰抂巕儗僊儏儗乕僞偱偡丅嫋梕懝幐偼2W偱偡偐傜丄栺285倣A傑偱弌椡偱偒傑偡丅
儌乕僞乕傪僪儔僀僽偡傞偺偱1A偺僸儏乕僘擖傟偰偁傝傑偡丅枩偑堦偺帪偱傕敪墝丄敪壩偼尩嬛偱偡丅
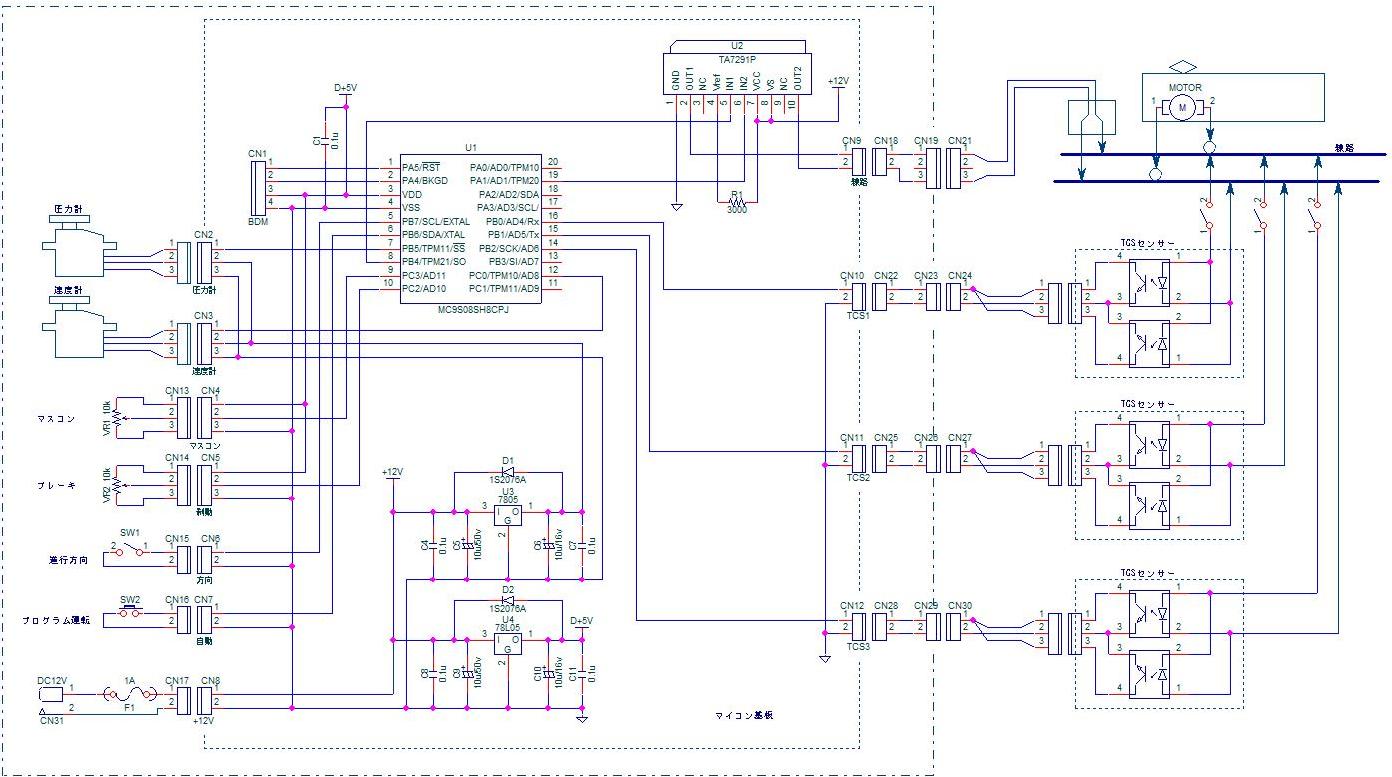
亂儅僀僐儞廃曈夞楬亃
U1偼僼儕乕僗働乕儖偺8價僢僩儅僀僐儞MC9S08SH8CPJ偱偡丅儅僗僐儞VR偲僽儗乕僉VR偼AD曄姺偟傑偡丅恑峴曽岦SW丄僾儘僌儔儉塣揮SW丄TCS僙儞僒乕偼億乕僩B偵愙懕偟偰丄撪晹偱僾儖傾僢僾偟傑偡丅
PWM弌椡偼2宯摑偵側傝丄TPM1宯摑偼僒乕儃偺惂屼丄TPM2宯摑偼儌乕僞乕僪儔僀僶乕偵捈愙愙懕偟傑偡丅慄楬亖儌乕僞乕偲巚偊偽椙偄偱偟傚偆丅
TCS僙儞僒乕偼巗斕偺暔傪愙懕偱偒傞傛偆偵偟偰偄傑偡丅拞恎偼僼僅僩僇僾儔偱僙儞僒乕偵揹幵偑棃傞偲幵椫偑僙儞僒乕偵愙怗偟偰慄楬偺揹埑偑僙儞僒乕撪偺僼僅僩僇僾儔傪揰摂偝偣傑偡丅偳偪傜偺慄楬偑+偐偱揹幵偺恑峴曽岦偵傛傝弌椡僩儔儞僕僗僞偺偳偪傜偐偑ON偟傑偡丅崱夞偼恑峴曽岦偵偁傑傝娭學側偄偺偱暲楍愙懕偟偰巊梡偟傑偡丅
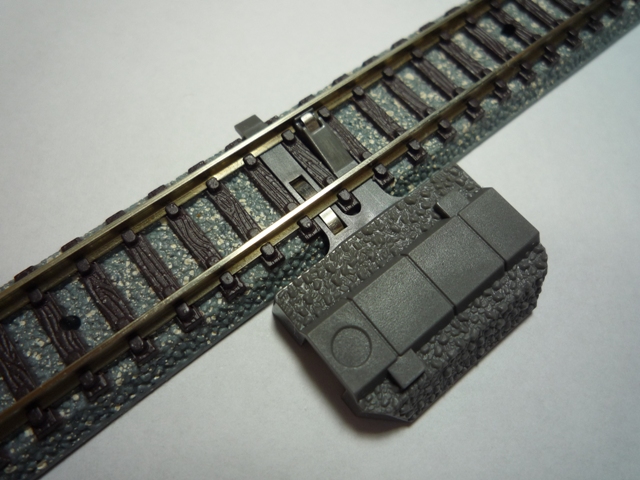
亂TCS僙儞僒乕亃
揹幵偺幵椫偑偙偺僙儞僒乕偵愙怗偡傞偲僆乕僾儞僐儗僋僞偑ON偟傑偡丅乮夞楬恾塃懁TCS僙儞僒乕嶲徠乯恑峴曽岦偵傛傝偦傟偧傟偺僩儔儞僕僗僞偑摦嶌偟傑偡偑丄崱夞偼恑峴曽岦偵娭學側偄偺偱僐儗僋僞傪僔儑乕僩偟偰巊梡偟傑偡丅