4.データ整理
2)砂利の上でおしりを滑らす。
ひとしきり気持ちよく走って到着した場所は広い砂利の敷き詰めてある場所。ここでちょっとお尻をすべらせてみて、その時の荷重状態を見てみることにしました。ここで掲げるデータは、垂直軸を拡大して、加速度の変化が見えるようにしてあります。ノイズが大量にのっているように見えますが、これは砂利の上を走行したためです。波形の左側にみえる盛り上がりが、ちょうどお尻を滑らせたときです。お尻を滑らせる時間は短いので、時間軸をすこし短くし、1目盛りあたり2秒に設定しています(Time/divを2s/divに設定)。
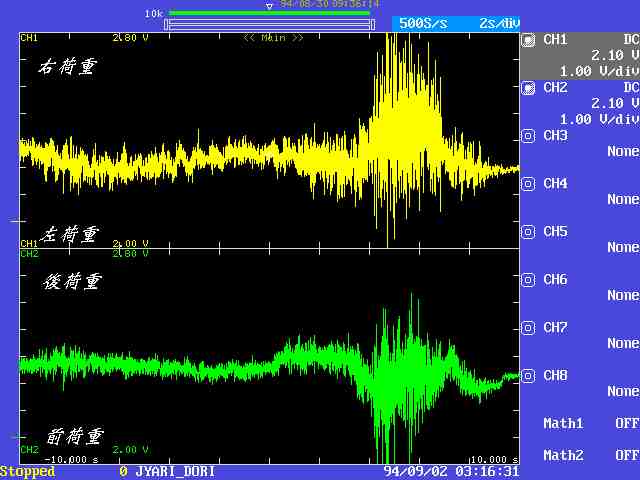
砂利の上でお尻を滑らせてみたときの荷重推移
さすがにこのままではノイズだらけでわかり難いので、デジタルオシロの機能の一つである数値演算機能を用いて、すこしデータをまともなものにしてみましょう。とりあえずデジタルフィルタをかけてみました。具体的には、カットオフ周波数10Hz、ガウス特性を持つ低域通過フィルタをかけることにより、ノイズ成分である高い周波数をカットするというわけです。このオシロは、一度生データを記録しておけば、このように後からデータ加工ができるので大変便利です。
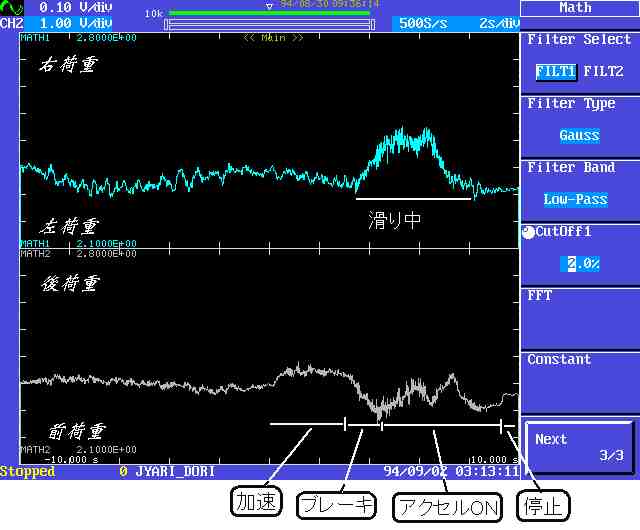
砂利の上でお尻を滑らしたデータを加工したもの
だいぶ、波形として見やすいものになってくれました。灰色は、進行方向のG、水色は左右方向のGです。まずお尻を滑らすにあたって、ある程度の速度まで加速しましたから、灰色の波形が上に上がり後ろへ荷重がかかります。そしてブレーキを踏んで荷重を前に移しましたので、灰色の波形がぐっと下にさがります。そしてこの前に荷重がかかった状態で左へハンドルを切りましたので、水色の波形が上にあがり、右へ荷重がかかった様子がみられます。そしてお尻が滑り始めたときにアクセルONでお尻がすべりながら荷重が後ろへ移動、そこでハンドルを戻して停止したため、前後左右方向のGがなくなり終了
舗装道路上では恐ろしくてとてもお尻を滑らすなんてことはできませんが、砂利の上だと低速でも楽に滑らすことが出きるのでとても楽しいです。
舗装道路に比べ、さすがに砂利の上ではノイズが多く、フィルタの手助けが必要ということがわかりました。また、砂利の上でお尻を滑らせたとき、センサ出力は200mV程度の変化量と思ったよりすくないです。
以上は、ブレーキをかけたあと、アクセルドン!でお尻を滑らせましたが、今度はサイドブレーキを用いてすべらせてみることにしました。

サイドブレーキを引いて回転させた時の荷重推移
さぁいくぜ! と加速を開始。ハンドルを切ると同時にサイドをぐっと引くと、車はスピンに近い状態に。このとき、アクセルを離しておりましたから、そのまま車は停止。スピンといっても車は180°も回らない程度で停止する程度のものです。結果としては横方向のGがあまりかかっていないことがわかります。単にくるんと回っただけでは、あまり横Gというものはかからないようです。まぁ、センサが車の中心にありますから、ここを軸に回転したとすればあまりGはかからないということでしょうか。