![]() 僨僶僀僗愝掕
僨僶僀僗愝掕
僾儘僙僢僒乕僄僉僗僷乕僩偱愝掕偟偨撪梕傪偛徯夘偟傑偡丅
丂丒AS1丗僔儕傾儖捠怣愝掕(UART)
丂丒PWM1乣4丗僞僀儅乕偺PWM愝掕
丂丒FC1丗儌僕儏儘乕僞僀儅乕偺僼儕乕僇僂儞僞乕愝掕
丂丒Bits2丗梊旛偺弌椡億乕僩愝掕
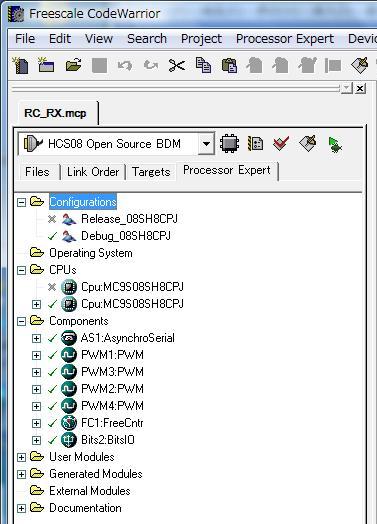
CodeWarrior偱嶌惉偟偨僾儘僕僃僋僩僼僅儖僟傪僟僂儞儘乕僪偱偒傑偡丅CODE僼僅儖僟偵慡偰偺僜乕僗偑偁傝傑偡丅
RC2_RX.lzh 傊偺儕儞僋仼僋儕僢僋偟偰僟僂儞儘乕僪偟偰偔偩偝偄丅
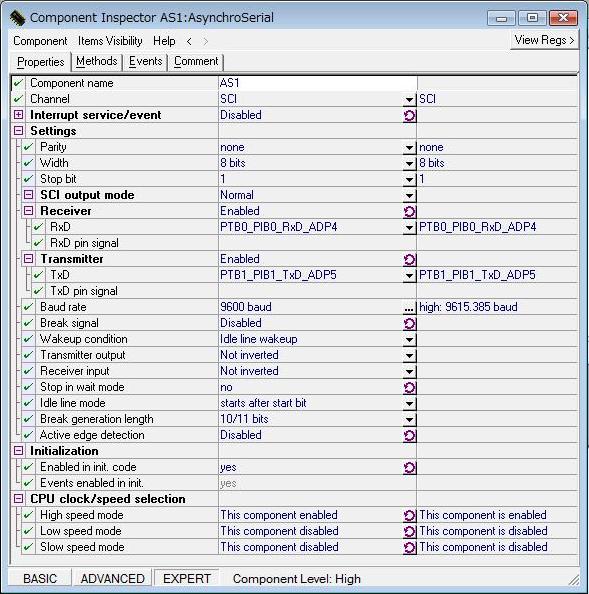
亂僔儕傾儖捠怣愝掕亃AsynchroSerial
捠怣偡傞憡庤偼庴怣儌僕儏乕儖偺XBEE偱偡丅Baud rate傪9600偵愝掕偟傑偡丅岆嵎偼0.16亾側偺偱捠怣偵巟忈偼偁傝傑偣傫丅Receiver偼巊梡偟傑偣傫偑彨棃偺帠傕峫椂偟偰丄攝慄偟偰偁傝傑偡偺偱Enabled偵愝掕偟偰偄傑偡丅Parity側偟丄Width偼8價僢僩丄Stop
bit偼1價僢僩偱偡丅
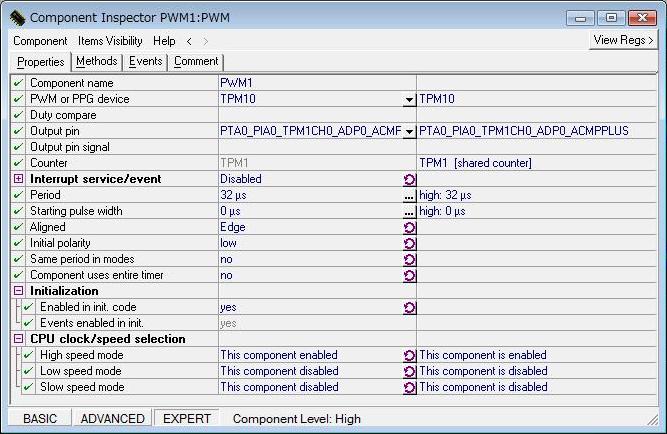
亂PWM1乣4愝掕亃PWM
PWM弌椡偼TPM10丄TPM11丄TPM20丄TPM21偺4偮偺億乕僩偐傜弌椡偱偒傑偡丅偦傟偧傟偺Period傪32uS丄Starting
pulse width傪0兪S丄Initial polarity偼Low偱偡丅
僞僀儅乕侾(TPM1)偼Output pin偑暋悢偁傝慖戰偱偒傞傛偆偵側偭偰偄傑偡丅夋柺塃忋偺View Regs>傪僋儕僢僋偡傞偲愝掕儗僕僗僞偺撪梕傪妋擣偡傞帠偑弌棃傑偡丅
Output pin傪曄峏偡傞偲SOPT2儗僕僗僞偺抣偑曄壔偡傞帠傪妋擣偱偒傑偡丅億乕僩A擖弌椡愝掕儗僕僗僞PTADD偱PTA0偼弌椡偵愝掕偝傟偰偄傑偡丅PWM弌椡偵偼昁梫側愝掕偺傛偆偱偡丅廃攇悢偑崅偡偓偰堦晹偺娭悢傪棙梡偱偒側偄偨傔丠儅乕僋偑昞帵偝傟傞帠偑偁傝傑偡丅
俵倕倲倛倧倓倱僞僽傪慖傫偱俽倕倲DutyMS偲偄偆娭悢偺惗惉傪偟側偄傛偆偵亊報偵愝掕偟偰偔偩偝偄丅崱夞俹倂俵偱偼丄僾儘僙僢僒乕僄僉僗僷乕僩偱惗惉偝傟傞娭悢偼巊梡偟側偄偺偱慡偰亊偱傕俷俲偱偡丅
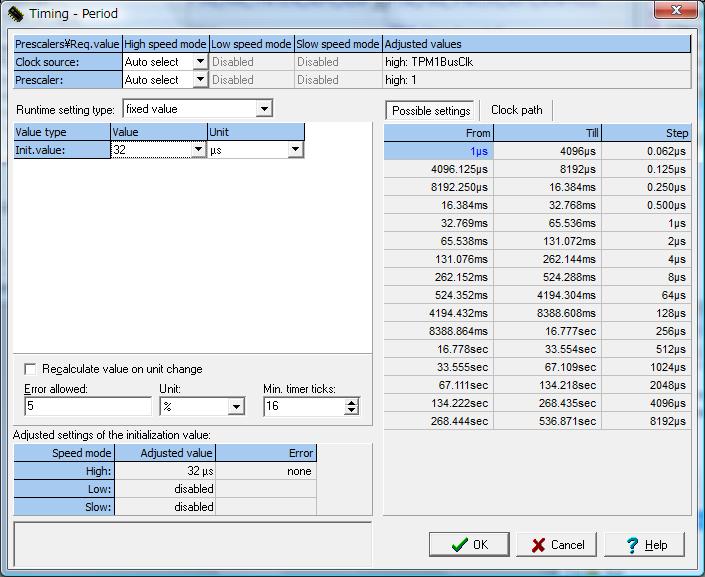
Period偺32倳俽偺悢帤偺塃偺![]() 儃僞儞傪僋儕僢僋偡傞偲壓恾偺傛偆側愝掕夋柺偑尰傟傑偡丅塃懁偺昞偺俽倲倕倫偑俹倂俵偱惂屼偱偒傞曄壔偺嵟彫抣偵側傝傑偡丅堦斣忋偺峴偼0..062倳俽偲側偭偰偄傑偡偑丄幚嵺偵偼0.0625倳俽偱偡丅崱夞偺俹倂俵惂屼斖埻偼憲怣婡偐傜憲傜傟偰偔傞10價僢僩偱偡偐傜0偐傜1023偺斖埻偱偡偑慜恑偲屻恑偵暘偐傟偰偟傑偆偺偱丄俹倂俵惂屼斖埻偼敿暘偺512僗僥僢僾偲側傝傑偡丅0.0625倳俽傪512攞偡傞偲32倳俽偵側傝傑偡丅俹倕倰倝倧倓傪32倳俽偵愝掕偡傞偲俹倂俵惂屼偑0偐傜511偱僷儖僗暆偑0亾偐傜100亾傑偱偺曄壔偲側傝傑偡丅廃攇悢偼31.25倠俫倸偲側傝儌乕僞乕僪儔僀僶乕偺俹倂俵惂屼廃攇悢斖埻偵廂傔傞帠偑弌棃傑偡丅
儃僞儞傪僋儕僢僋偡傞偲壓恾偺傛偆側愝掕夋柺偑尰傟傑偡丅塃懁偺昞偺俽倲倕倫偑俹倂俵偱惂屼偱偒傞曄壔偺嵟彫抣偵側傝傑偡丅堦斣忋偺峴偼0..062倳俽偲側偭偰偄傑偡偑丄幚嵺偵偼0.0625倳俽偱偡丅崱夞偺俹倂俵惂屼斖埻偼憲怣婡偐傜憲傜傟偰偔傞10價僢僩偱偡偐傜0偐傜1023偺斖埻偱偡偑慜恑偲屻恑偵暘偐傟偰偟傑偆偺偱丄俹倂俵惂屼斖埻偼敿暘偺512僗僥僢僾偲側傝傑偡丅0.0625倳俽傪512攞偡傞偲32倳俽偵側傝傑偡丅俹倕倰倝倧倓傪32倳俽偵愝掕偡傞偲俹倂俵惂屼偑0偐傜511偱僷儖僗暆偑0亾偐傜100亾傑偱偺曄壔偲側傝傑偡丅廃攇悢偼31.25倠俫倸偲側傝儌乕僞乕僪儔僀僶乕偺俹倂俵惂屼廃攇悢斖埻偵廂傔傞帠偑弌棃傑偡丅
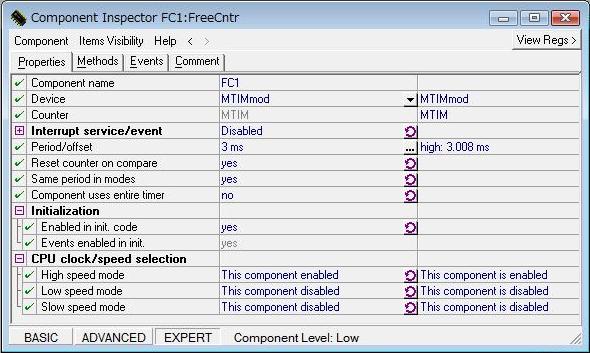
亂儌僕儏儘乕僞僀儅乕愝掕亃俥俠1
僔儕傾儖捠怣僞僀儉傾僂僩梡僞僀儅乕偺愝掕偱偡丅僐儞億乕僱儞僩儔僀僽儔儕偐傜俥倰倕倕俠値倲倰傪慖戰偟丄俢倕倴倝們倕偵俵俿俬俵倣倧倓偵愝掕偡傞偲儌僕儏儘乕僞僀儅乕愝掕偵側傝傑偡丅
俹倕倰倝倧倓乛倧倖倖倱倕倲傪3倣俽偵愝掕偟丄俬値倲errupt偼俢倝倱倎倐倢倕倓偲偟傑偡丅
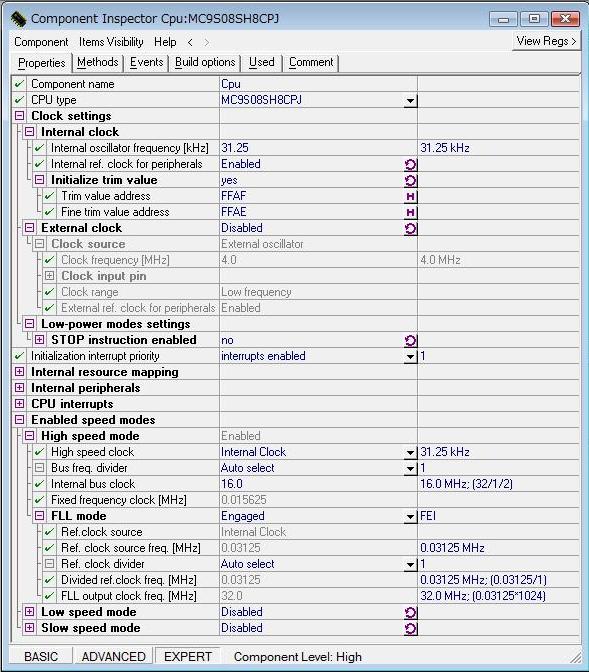
亂CPU愝掕亃MC9S08SH8CPJ
CPU偺愝掕偼摿偵曄峏偟偰偄傑偣傫丅僶僗僋儘僢僋偼16MHz偱偡丅Methods偱Delay100US傪僟僽儖僋儕僢僋偟偰僠僃僢僋傪擖傟偰偔偩偝偄丅慡偰偺愝掕偑廔傢偭偨傜嵍忋偺僐儅儞僪Prosessor
Expert偺Generate Code乫RC_RX.倣們倫乫傪僋儕僢僋偟偰僐乕僪傪惗惉偟傑偡丅