
4台目のレースロボット
おもちゃ屋でデジQという超小型の赤外線コントロールの無線操縦の
車を特価(2980円を500円)で売っているのを見つけていくつか購入
して作成しました。
このデジQは左右の動輪を別のモータで回転させることによる操舵方法
を採用しているので、今まで私が作っていきたレースロボットと同じ
原理なのです。これを利用すれば超小型のロボットが作れるとはずと
考え思わず購入してしまったのです。
 まずライントレースができるか、センサはどんなものを使えばいいか
など調べるために、試作機をつくりました。これはゴールセンサーが
ないので競技に出場はできないものです。しかし、この試作機で
センサの種類や付け方などある程度メドがつき、それなりに調子よく
はしったので、このデジQを母体にしたレースロボットで競技に
出場することにしました。ただ、最初は、あくまでこれは受けねらいで
本命は去年作成したもので出場するつもりでした。ところが、レースで
完走できるようにセンサの数を増やすのに結構てまどり、複数エントリーは
したものの、結局このデジQ母体のものしか出場させることができません
でした。
まずライントレースができるか、センサはどんなものを使えばいいか
など調べるために、試作機をつくりました。これはゴールセンサーが
ないので競技に出場はできないものです。しかし、この試作機で
センサの種類や付け方などある程度メドがつき、それなりに調子よく
はしったので、このデジQを母体にしたレースロボットで競技に
出場することにしました。ただ、最初は、あくまでこれは受けねらいで
本命は去年作成したもので出場するつもりでした。ところが、レースで
完走できるようにセンサの数を増やすのに結構てまどり、複数エントリーは
したものの、結局このデジQ母体のものしか出場させることができません
でした。
作成の課程を紹介します。デジQを購入してまずどう使うかを検討しました。
最初は、モータとギヤボックスの部分のみ取り出して後の車体などは
自作するつもりでした。しかし、考えてみればせっかく車の形をしているし、
モータドライバや、2.4Vのニッケル水素電池からロジック用の5Vを作る
昇圧回路などが乗っています。これらを利用すればかなり手間を省いて
動くものが作れるだろうと考えました。幸いデジQの中身は
こちらの分解くんのページにあった資料を参考にさせて
いただきました。回路などは
こちらのロボット製作ページにまとまっています。
 デジQの基本的な部分は利用することにします。そこでまず、デジQの
基板からCPUを取り外します。
デジQの基本的な部分は利用することにします。そこでまず、デジQの
基板からCPUを取り外します。
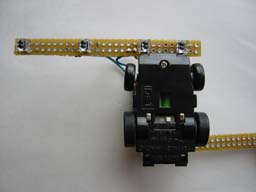
CPUを取り外して、センサの基板をつけるとこんな感じになります。
センサの基板は前輪を押させる役目もかねています。
 次に光りリモコンの信号を受ける受光モジュールを取り外します。
次に光りリモコンの信号を受ける受光モジュールを取り外します。

 以前CPUがついていたところから、5Vの電源とモータをコントロール
している信号線を取り出します。受光モジュールを支えていた部品の
向きが逆になっています。この部品の上に1.4mmのネジでCPUボードを
固定します。後になってからバランサーの固定にも兼用しました。
以前CPUがついていたところから、5Vの電源とモータをコントロール
している信号線を取り出します。受光モジュールを支えていた部品の
向きが逆になっています。この部品の上に1.4mmのネジでCPUボードを
固定します。後になってからバランサーの固定にも兼用しました。
左の写真は試作機のものです。最終版のロボットのものとドライバICへの
信号は少し違います。それはセンサの数が増えてモータコントロール用に
2bitしか使えなくなったためです。
 引き出した信号線をCPUボードにつなぎます。さらにそのCPUボードに
センサをつなぎます。
引き出した信号線をCPUボードにつなぎます。さらにそのCPUボードに
センサをつなぎます。
左の写真は最初のテスト用のセンサボードをつないだところです。この
段階でデジQの電源を使ってセンサやCPUを動かすことができるのか
試しました。その後センサ基板を取り替えて何種類かのセンサをどれが
一番よいか試しています。
最終的には走行テストも行い、
秋月で売っていたレンズ付きの小型のもの(GP2S05)にしました。
秋月の説明書によるとGP2S40という反射型のセンサにレンズが
ついたものだそうです。
 CPUはPICを使用しています。
12F629という8ピンのものです。
これは小さいのに多くの機能がついてますが、最終的にはセンサ用の
入力4bitにモータコントロール用の出力2bitを単純なI/Oとして
使っているだけで、いろいろあるコンパレータや割り込みは使用して
いません。
CPUはPICを使用しています。
12F629という8ピンのものです。
これは小さいのに多くの機能がついてますが、最終的にはセンサ用の
入力4bitにモータコントロール用の出力2bitを単純なI/Oとして
使っているだけで、いろいろあるコンパレータや割り込みは使用して
いません。
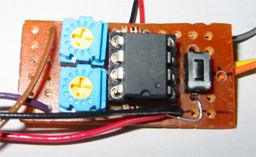
写真は試作機のものですので、センサが2つです。そのための
調整用の可変抵抗も2つしか乗っていません。ビットに余裕が
あったのでスタートスイッチもついています。しかし、最終版の
センサが4つのものは、可変抵抗も4つになりCPU基板も少し
大きくなっています。スタートスイッチはなくなり、電源を
入れた後に一定時間経つとスタートする形になりました。
 CPUのI/Oポートにはセンサのフォトトランジタの出力を直接つないで
います。12F629は多機能なのにI/Oとして使えるピンは6ピンしか
ありません。そのために一つのピンに多くの機能を割り当てています。
そのために一つ一つのピンのアナログ的な特性が微妙に違うようなの
です。実はどこかのレジスタの設定を上手く行えばそのような差は
問題無くなるのかもしれません。しかし、私はそのあたり上手くできず、
かなり苦労しました。センサとモータコントロールに割り当てるピンを
何度か入れ替えてなんとか希望する結果を得ることができました。
CPUのI/Oポートにはセンサのフォトトランジタの出力を直接つないで
います。12F629は多機能なのにI/Oとして使えるピンは6ピンしか
ありません。そのために一つのピンに多くの機能を割り当てています。
そのために一つ一つのピンのアナログ的な特性が微妙に違うようなの
です。実はどこかのレジスタの設定を上手く行えばそのような差は
問題無くなるのかもしれません。しかし、私はそのあたり上手くできず、
かなり苦労しました。センサとモータコントロールに割り当てるピンを
何度か入れ替えてなんとか希望する結果を得ることができました。
 複数のデジQを使っていろいろ試作をしながら製作をしたために
ここのページにある写真はよく見ると何台かのデジQで微妙に
違っているはずです。
複数のデジQを使っていろいろ試作をしながら製作をしたために
ここのページにある写真はよく見ると何台かのデジQで微妙に
違っているはずです。
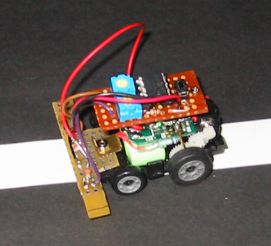
それで、左の写真がロボットレースの大会にでたものです。
センサの数は前方に4つ、内訳は車体の左右に一つづつあり、これで
ラインをトレースします。右側に大きく突き出ているアームの
先端にゴールセンサがあります。ゴールした時に停止するのに
使います。ただ、ゴールセンサ一つでは、十字路とゴールマーカー
の区別をすることができません。そこでアームの真中あたりに
十字路センサがあります。ゴールマーカーはラインから4cm離れた
所か描かれているので、ラインが交わっている十字路と区別する
ことができます。
 最初センサの数を減らしたくてなんとか3つで出来ないかいろいろ
考えてみたのですが、やはりゴールマーカーを検知してゴールで
停止するには、最低4つのセンサが必要です。
最初センサの数を減らしたくてなんとか3つで出来ないかいろいろ
考えてみたのですが、やはりゴールマーカーを検知してゴールで
停止するには、最低4つのセンサが必要です。
後ろで左側に突き出たアームはバランスを取るためのものです。
右側に大きく突き出たセンサアームの為に右に曲がる時に左側の
車輪が浮いてしまう現象が起ったために後から取り付けました。
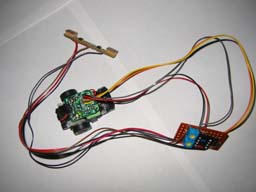
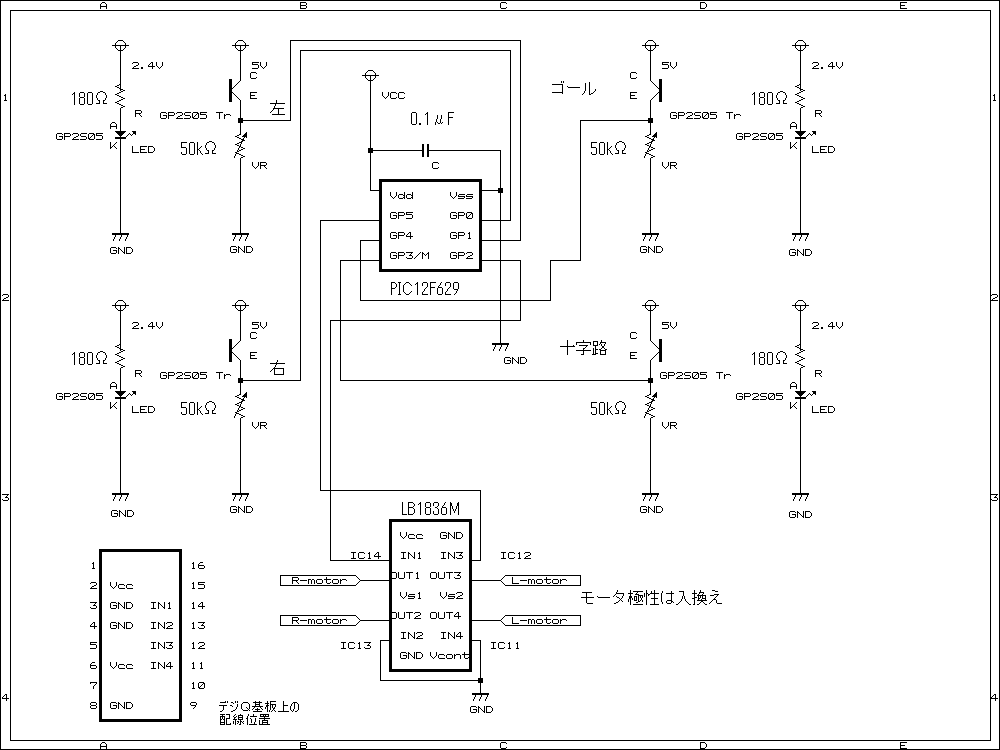
大会出場時の回路をおいておきます。できるだけ余計な
部品はなくしましたのでシンプルなものになっています。
 さて、使用しているCPUは8ピンタイプで使えるI/Oが6ピンしか
ないものです。全て使用しています。ここで問題が発生しました。
センサの感度調整です。感度調整用の可変抵抗は付けたのですが、
これでは勘で調節してロボットの動作を見て状態を推測するしか
ありません、それでは余りに非効率です。そこで、センサの感度
調整をするときは別に調整用の回路を用意してCPUに差し換えて
調整をする方法を考えました。
さて、使用しているCPUは8ピンタイプで使えるI/Oが6ピンしか
ないものです。全て使用しています。ここで問題が発生しました。
センサの感度調整です。感度調整用の可変抵抗は付けたのですが、
これでは勘で調節してロボットの動作を見て状態を推測するしか
ありません、それでは余りに非効率です。そこで、センサの感度
調整をするときは別に調整用の回路を用意してCPUに差し換えて
調整をする方法を考えました。
最初74HCのロジックICで回路を組んだのですが、I/Oピンの特性が
違うようで全然上手く行きませんでした。それで仕方がなく、
調整回路にも12F629を使用することにしました。センサに
対応するピン番号も合わせました。ただこの方法では調整回路用に
2つ12F629を使うはめになりました。なんかもっといい方法が
ないかいろいろ考えたのですが思い付きませんでした。
全国大会に出る前に今年(2004年)は中部地区の大会に参加しました。
事前に試しておきたかったこともありますが、その時期に動く
ロボットが出来上がっていたので参加したのです。
結果は、ラインの幅が途中で2mm ほど狭いところがあり、そこで
止まってしまってリタイヤとなりました。
センサの間隔は3パターン程試した結果決めたものですが、テープの
幅が規定より狭くなっているというのは想定外です。幅が狭くなった
理由は、テープをコースのベニア板に貼る時におもいきり引っ張って
はったためのように思われます。そのためにテープがのびて本来の
幅より狭くなってしまったようです。教訓として、やはり実際に
競技に出てみると新しい問題点が発見されるということです。
そこで、センサの幅をさらに内側に左右それぞれ1mm弱ずらした
ものを作成して試しました。多少ソフトの書き換えは必要でしたが、
自宅のテストコースでほぼ以前と同様に動いたので、そのまま
全国大会に出場しました。
今年の全国大会は休みをとることができたので、前日の試走会から
参加しました。ところが会場について荷物をあけてみるとPICの
書込機がありません、自宅に忘れてしまったのです。これは大失敗。
仕方がないので、自宅で調整したロボットを走らせてみたのですが、
なかなか調子よく走ります。まあ、このままでもいいかと、割り切って
翌日の予選に望みました。
 今回のデジQ改造タイプのロボットレーサーは、電池があまりもたないと
いう問題があります。もともとのデジQの電池の容量も小さいようですし、
センサにかなりの電力を消費しているとおもわれるので、3分程度しか
走らすことができません。電池の電圧を監視してそれに合わせてモータを
コントロールすればもっと稼動時間をのばすことは可能だと思われますが、
CPUを別のものにするなどハードの改良が必要です。
今回のデジQ改造タイプのロボットレーサーは、電池があまりもたないと
いう問題があります。もともとのデジQの電池の容量も小さいようですし、
センサにかなりの電力を消費しているとおもわれるので、3分程度しか
走らすことができません。電池の電圧を監視してそれに合わせてモータを
コントロールすればもっと稼動時間をのばすことは可能だと思われますが、
CPUを別のものにするなどハードの改良が必要です。
いままでにかなり走行テストをしていますので、電池もへたってきていた
ようで、本番当日どうも充電が上手くいきませんでした。規格が同じと
思われることからコンバットデジQの充電器を利用しているのですが、
いつもは15分かかる充電が5分程度で終わってしまったのです。
そこで少し走らせて、やっぱり充分充電できていないようなので
再度充電器につないだところまた5分ほど充電されました。まあ、これで
いけるだろうと判断して、そのまま予選に出場しました。
結果は1回目、3回目の走行で同じところで引っ掛かって止まってしまい
ました。2回目は操作ミス(上手くリセットできなかったと思われる)で
スタートマーカーをゴールマーカーと勘違いして停止してしまいました。
結果、リタイヤとなりました。
安定して走っていたので、ちょっと悔しかったです。後で見ていたところ
停止したところは、コースのテープが重ねて貼ってありました。この厚みを
超えられなかったようです。予選が終了した後に、一度モータを空回して
充分に放電した後にしっかり充電しなおして予選コースを走らせたところ
無事完走しました。最初に充電が上手く行かなかった時に放電して再充電
すべきでした。このあたり、出場経験のなさがあるのかもしれません。
時間があれば万全をきすべきでした。ただ、本番でなくてもきちっと
完走できたのでそれなりに嬉しさはあります。
翌日、決勝終了後、決勝コースを走らせてみたのですが、全然上手く
走りませんでした。コースの状態の違いのせいか、完走には運も必要な
程度の完成度だったようです。
今回小型のロボットレーサーで出場して、リタイヤにもかかわらず、
写真を取りたいという人がかなりいました。速く走れなくてもうけねらい
でもそれなりに注目されることが分かりました。でもやっぱり速く走って
注目されたいですね。
ホーム
一つ戻る
{kind=link}