儂價乕儐乕僓岦偗偺彫宆帺棩儘儃僢僩偲偄偊偽丄僗儕乕僨傿偺儚僋僠儞孨偑戙昞慖庤偱偟傚偆丅廩揹抮撪憼丄PIC 儅僀僐儞偱偺惂屼丄岝僙儞僒偱儔僀儞僩儗乕僗壜擻偲丄婘偺忋偩偗偱儘儃僢僩僾儘僌儔儈儞僌傪妝偟傓偙偲偑弌棃傑偡丅偑丄帺暘偺僆儕僕僫儖傪嶌傝偨偄丄儅僀僐儞偔傜偄偼帺暘偱僠儑僀僗偟偨偄偲偄偆梸朷偑梷偊偒傟偢丄峸擖傑偱帄傝傑偣傫丅廐梩尨偺僣僋儌儘儃僐儞儅僈僕儞娰偱偼丄偦偺儚僋僠儞孨偺嬱摦宯儐僯僢僩偩偗傪扨懱斕攧偟偰偄傑偡丅偙傟傪巊偊偽彫宆儘儃僢僩帺嶌偺堦斣偺娭栧傪僋儕傾弌棃傞両偲巚偭偰偄偨帪偵丄偪傚偆偳僞僇儔偑僨僕俻傪敪攧偟偰偔傟傑偟偨丅
儂價乕儐乕僓岦偗偺彫宆帺棩儘儃僢僩偲偄偊偽丄僗儕乕僨傿偺儚僋僠儞孨偑戙昞慖庤偱偟傚偆丅廩揹抮撪憼丄PIC 儅僀僐儞偱偺惂屼丄岝僙儞僒偱儔僀儞僩儗乕僗壜擻偲丄婘偺忋偩偗偱儘儃僢僩僾儘僌儔儈儞僌傪妝偟傓偙偲偑弌棃傑偡丅偑丄帺暘偺僆儕僕僫儖傪嶌傝偨偄丄儅僀僐儞偔傜偄偼帺暘偱僠儑僀僗偟偨偄偲偄偆梸朷偑梷偊偒傟偢丄峸擖傑偱帄傝傑偣傫丅廐梩尨偺僣僋儌儘儃僐儞儅僈僕儞娰偱偼丄偦偺儚僋僠儞孨偺嬱摦宯儐僯僢僩偩偗傪扨懱斕攧偟偰偄傑偡丅偙傟傪巊偊偽彫宆儘儃僢僩帺嶌偺堦斣偺娭栧傪僋儕傾弌棃傞両偲巚偭偰偄偨帪偵丄偪傚偆偳僞僇儔偑僨僕俻傪敪攧偟偰偔傟傑偟偨丅
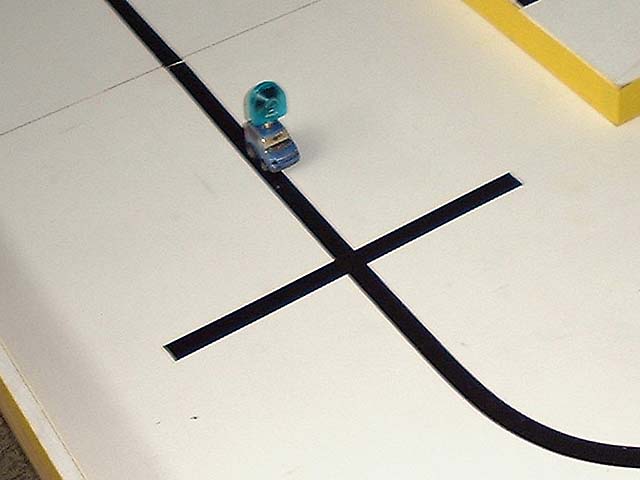
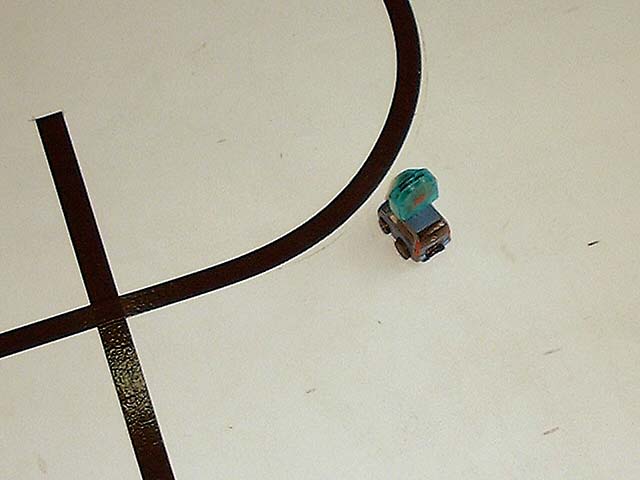
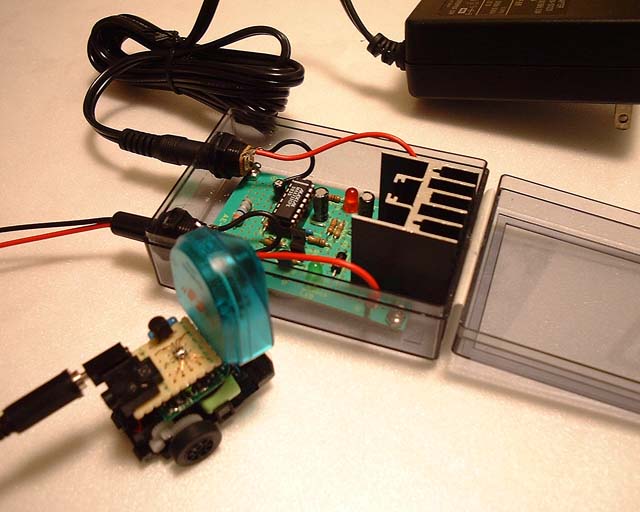
 僨僕俻偼愒奜慄偱儕儌僐儞憖嶌壜擻側僠儑儘俻偱丄暋悢摦嶌傪壜擻偵偡傞 MICRO IR 媄弍偑撪憼偺 CPU 偵幚憰偝傟偰偄傑偡丅儕儌僐儞帺摦幵偵偟偰偼捒偟偔丄愴幵偺傛偆偵嵍塃偺幵椫傪偦傟偧傟暿乆偺儌乕僞偱嬱摦偟偰偄傑偡丅偙傟偼傕偆儅僀僐儞宷偄偱帺暘偱儌乕僞傪夞偡偟偐側偄偱偡傛偹偊丅愒奜慄偱僐儞僩儘乕儖偲偄偆偺傕丄儅僀僐儞栰榊偺夝愅僑僐儘傪偔偡偖傝傑偡丅婛偵愒奜慄偺杺弍巘 K.I 巵傗傂傠偮偔巵偲偄偭偨偦偺摴偺僄僉僗僷乕僩偑丄僶儕僶儕椏棟偟偰偄傑偡丅
僨僕俻偼愒奜慄偱儕儌僐儞憖嶌壜擻側僠儑儘俻偱丄暋悢摦嶌傪壜擻偵偡傞 MICRO IR 媄弍偑撪憼偺 CPU 偵幚憰偝傟偰偄傑偡丅儕儌僐儞帺摦幵偵偟偰偼捒偟偔丄愴幵偺傛偆偵嵍塃偺幵椫傪偦傟偧傟暿乆偺儌乕僞偱嬱摦偟偰偄傑偡丅偙傟偼傕偆儅僀僐儞宷偄偱帺暘偱儌乕僞傪夞偡偟偐側偄偱偡傛偹偊丅愒奜慄偱僐儞僩儘乕儖偲偄偆偺傕丄儅僀僐儞栰榊偺夝愅僑僐儘傪偔偡偖傝傑偡丅婛偵愒奜慄偺杺弍巘 K.I 巵傗傂傠偮偔巵偲偄偭偨偦偺摴偺僄僉僗僷乕僩偑丄僶儕僶儕椏棟偟偰偄傑偡丅
帡偨傛偆側僞僀儈儞僌偱 TOMY 偐傜 BIT CHAR-G 側傞挻彫宆儔僕僐儞偑敪攧偝傟偰偄傑偡丅僨僕俻偲堘偄丄廃攇悢屌掕偺柍慄憖廲丄杮暔偺帺摦幵偲摨偠偔慜椫偱懬傪愗傞僞僀僾偱偡丅僨僕俻偑尦儅僀僐儞彮擭偺堊偺僆儌僠儍偲偡傟偽丄BIT CHAR-G 偼尦儔僕僐儞彮擭偺堊偺僆儌僠儍偲尵偊傞偺偱偟傚偆偐丅傕偪傠傫 BIT CHAR-G 傕峸擖偟傑偟偨偑丄暘夝偟偨偄偲偄偆梸媮偼梋傝姶偠傜傟偢丄晛捠偺儔僕僐儞偲偟偰妝偟傫偱偄傑偡丅
惂屼婎斅偺夝愅
 壗偼偲傕偁傟丄暘夝偟傑偡丅儃僨傿偲僔儍乕僔偺屌掕僱僕偼丄僱僕寠偑嶰妏宍偺摿庩僱僕偱偟偨丅PEGA-BT700 暘夝偺堊偵廐梩尨偺愮愇揹彜偱峸擖偟偨丄摿庩僪儔僀僶僙僢僩偺拞偺嶰枖僪儔僀僶偑栶偵棫偪傑偟偨丅僱僕傪奜偟丄忋晹偺愒奜慄庴岝儌僕儏乕儖傪墴偟崬傒側偑傜屻晹偺僣儊傪奜偡偙偲偱丄儃僨傿偑僔儍乕僔偐傜暘棧偟傑偡丅僨僕俻偺暘夝夁掱偵偮偄偰偼丄暘夝偔傫儁乕僕偵傕摨偠傛偆側幨恀傪宖嵹偟偰偄傑偡丅
壗偼偲傕偁傟丄暘夝偟傑偡丅儃僨傿偲僔儍乕僔偺屌掕僱僕偼丄僱僕寠偑嶰妏宍偺摿庩僱僕偱偟偨丅PEGA-BT700 暘夝偺堊偵廐梩尨偺愮愇揹彜偱峸擖偟偨丄摿庩僪儔僀僶僙僢僩偺拞偺嶰枖僪儔僀僶偑栶偵棫偪傑偟偨丅僱僕傪奜偟丄忋晹偺愒奜慄庴岝儌僕儏乕儖傪墴偟崬傒側偑傜屻晹偺僣儊傪奜偡偙偲偱丄儃僨傿偑僔儍乕僔偐傜暘棧偟傑偡丅僨僕俻偺暘夝夁掱偵偮偄偰偼丄暘夝偔傫儁乕僕偵傕摨偠傛偆側幨恀傪宖嵹偟偰偄傑偡丅
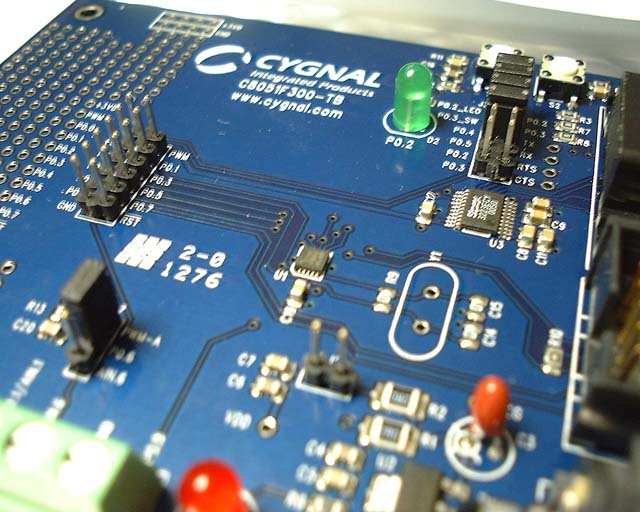
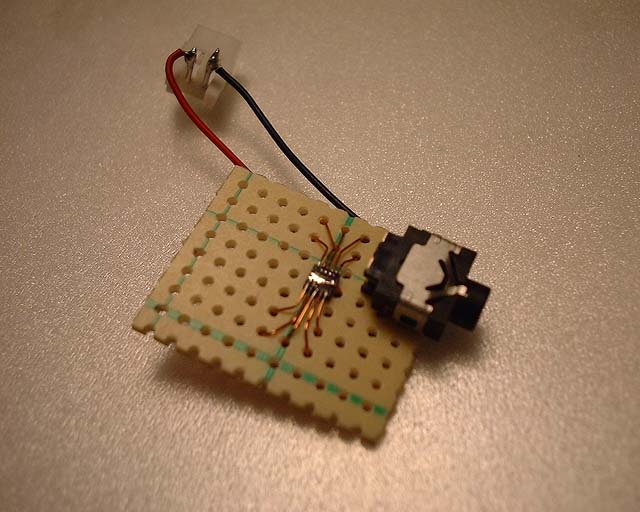
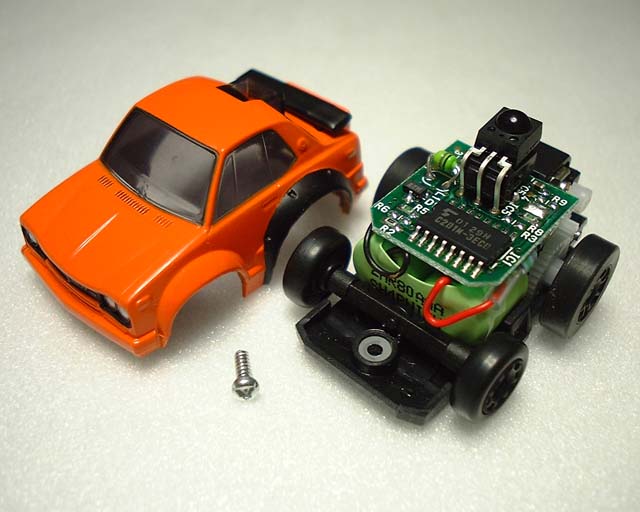 師偵惂屼婎斅偺夝愅偱偡丅僥僗僞偲栚帇偱戝榞偺寢慄傪棟夝偟丄夝愅儊儌偵傑偲傔傑偟偨丅婎斅忋柺偵嵹偭偰偄傞偺偑 CPU 偱丄偍偦傜偔搶幣偺 4bit 儅僀僐儞 TMP47C201M 偩偲巚傢傟傑偡丅2.4V 偺廩揹抮弌椡傪徃埑偟偨 5V 庛偺揹埑偑丄CPU 偺 pin16 偵嫙媼偝傟偰偄傑偡丅婎斅偺棤懁偵偼嶰梞偺儌乕僞僪儔僀僶 LB1836M 偑嵹偭偰偍傝丄偙偪傜偼廩揹抮偺 2.4V 偑偦偺傑傑揹尮偵嫙媼偝傟偰偄傑偟偨丅CPU 偺 I/O pin11乣14 偑丄儌乕僞僪儔僀僶偺 IN1乣4 偵愙懕偝傟偰偍傝丄偙偙傪忔偭庢傟偽儌乕僞偺惂屼偑壜擻偲側傝傑偡丅
師偵惂屼婎斅偺夝愅偱偡丅僥僗僞偲栚帇偱戝榞偺寢慄傪棟夝偟丄夝愅儊儌偵傑偲傔傑偟偨丅婎斅忋柺偵嵹偭偰偄傞偺偑 CPU 偱丄偍偦傜偔搶幣偺 4bit 儅僀僐儞 TMP47C201M 偩偲巚傢傟傑偡丅2.4V 偺廩揹抮弌椡傪徃埑偟偨 5V 庛偺揹埑偑丄CPU 偺 pin16 偵嫙媼偝傟偰偄傑偡丅婎斅偺棤懁偵偼嶰梞偺儌乕僞僪儔僀僶 LB1836M 偑嵹偭偰偍傝丄偙偪傜偼廩揹抮偺 2.4V 偑偦偺傑傑揹尮偵嫙媼偝傟偰偄傑偟偨丅CPU 偺 I/O pin11乣14 偑丄儌乕僞僪儔僀僶偺 IN1乣4 偵愙懕偝傟偰偍傝丄偙偙傪忔偭庢傟偽儌乕僞偺惂屼偑壜擻偲側傝傑偡丅
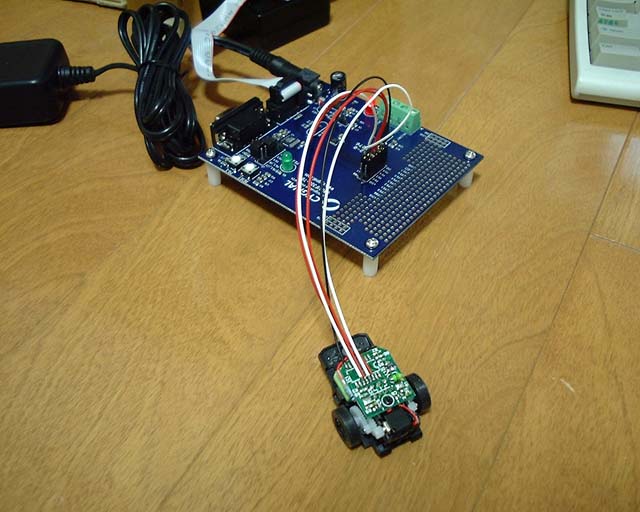 CPU 傪婎斅偐傜攳偑偟偰傒傑偟偨丅僴儞僟媧庢傝慄傪巊偭偰 CPU 懌偲婎斅揹嬌偺娫偺僴儞僟傪尭傜偟丄僐僥偱懌傪抔傔側偑傜丄偰偙偺尨棟偱懌傪帩偪忋偘偰偄偔偲丄娙扨偵 CPU 傪庢傝奜偡偙偲偑弌棃傑偡丅愒奜慄儌僕儏乕儖傕丄崱夞偼晄梫側偺偱庢傝奜偟傑偡丅CPU 偺懌偑晅偄偰偄偨 pin8(GND), pin11乣14(儌乕僞僪儔僀僶惂屼) 偺俆偮偺揹嬌傪儅僀僐儞昡壙儃乕僪偲愙懕偡傞偙偲偱丄娙扨偵儌乕僞傪夞偡偙偲偑弌棃傑偟偨丅
CPU 傪婎斅偐傜攳偑偟偰傒傑偟偨丅僴儞僟媧庢傝慄傪巊偭偰 CPU 懌偲婎斅揹嬌偺娫偺僴儞僟傪尭傜偟丄僐僥偱懌傪抔傔側偑傜丄偰偙偺尨棟偱懌傪帩偪忋偘偰偄偔偲丄娙扨偵 CPU 傪庢傝奜偡偙偲偑弌棃傑偡丅愒奜慄儌僕儏乕儖傕丄崱夞偼晄梫側偺偱庢傝奜偟傑偡丅CPU 偺懌偑晅偄偰偄偨 pin8(GND), pin11乣14(儌乕僞僪儔僀僶惂屼) 偺俆偮偺揹嬌傪儅僀僐儞昡壙儃乕僪偲愙懕偡傞偙偲偱丄娙扨偵儌乕僞傪夞偡偙偲偑弌棃傑偟偨丅
-
11寧2擔帪揰偱偺僨僕俻惂屼婎斅夝愅儊儌 (2KByte TEXT 僼傽僀儖)
儅僀僐儞偲 Treva 傪搵嵹
 偝偰丄偙偺僒僀僘偵儅僀僐儞傪搵嵹偟傛偆偲偡傞偲丄寢峔戝曄偱偡丅廐寧揹巕捠彜偵偰斕攧偟偰偄傞 QFP 斉 TinyH8 儃乕僪偱傕丄偼傒弌偟偰偟傑偄傑偡丅PIC12C509 傗 AVR AT90S2323 偲偄偭偨 8pin DIP 儅僀僐儞傪巊偆偺偑椙偝偦偆偱偡偑丄奜晅偗敪怳巕傪娷傔傞偲丄寢嬊偦傟側傝偺戝偒偝偵側偭偰偟傑偄傑偡丅
偝偰丄偙偺僒僀僘偵儅僀僐儞傪搵嵹偟傛偆偲偡傞偲丄寢峔戝曄偱偡丅廐寧揹巕捠彜偵偰斕攧偟偰偄傞 QFP 斉 TinyH8 儃乕僪偱傕丄偼傒弌偟偰偟傑偄傑偡丅PIC12C509 傗 AVR AT90S2323 偲偄偭偨 8pin DIP 儅僀僐儞傪巊偆偺偑椙偝偦偆偱偡偑丄奜晅偗敪怳巕傪娷傔傞偲丄寢嬊偦傟側傝偺戝偒偝偵側偭偰偟傑偄傑偡丅
偟偐偟丄偙偺傛偆側帠椺偵嵟揔側傕偺偑偁傝傑偡丅Cygnal 幮偺 8051 屳姺儅僀僐儞 C8051F300 偱偡丅偙傟偼 3mm 巐曽偺挻彫宆僷僢働乕僕撪偵 Flash ROM 8KByte丄RAM 256Byte丄25MHz 8051 僐傾丄2% 僆僔儗乕僞傪撪憼偟丄3V 偺揹尮傪偮側偖偩偗偱 24.5MHz 偱偺摦嶌偑幚尰弌棃傑偡丅偦傟偩偗偱傕僗僑僀偺偱偡偑丄撪憼廃曈傕廩幚偟偰偄偰丄16bit 僞僀儅俁杮丄UART丄I2C丄傾僫儘僌僐儞僷儗乕僞丄偦偟偰曄姺懍搙偑 500Ksps 側 A/D 僐儞僶乕僞 8ch 撪憼偲偄偆慺惏傜偟偝丅幚嵺偵偼慡偰偺婡擻傪摨帪偵偼巊偊偢丄俉杮偺 I/O 抂巕傪嫟梡偡傞偺偱偡偑丄偦傟偵偟偰傕偙偺僋儔僗偺懠偺儅僀僐儞傪椊夗偡傞婡擻偑 3mm 巐曽偺僷僢働乕僕偵擖偭偰偄傞偺偵偼嬃偒偱偡丅
 偝傜偵 Cygnal 幮偺 Web 儁乕僕偱偼丄僠僢僾扨懱偩偗偱側偔 $99 偺奐敪僉僢僩傪峸擖偡傞偙偲偑弌棃傑偡丅偙偺奐敪僉僢僩偼傾僙儞僽儔偲昡壙斉偺俠僐儞僷僀儔偑摨崼偝傟丄GND 娷傔偰俁杮 CPU 偲寢慄傪偡傞偩偗偱丄僔儕傾儖傾僟僾僞傪夘偟偨僆儞僠僢僾僨僶僢僈偵傛傞僜乕僗僐乕僪僨僶僢僌偑壜擻偵側傝傑偡丅偙傟偼傕偆悽奅拞偺儅僀僐儞栰榊偼懄攦偄儌僲偱偡偹偊丅崙撪偱偼嶰梞偑斕攧傪偟偰偍傝丄偙偪傜傕 Web 儁乕僕偐傜峸擖偡傞偙偲偑弌棃傞傛偆偱偡丅
偝傜偵 Cygnal 幮偺 Web 儁乕僕偱偼丄僠僢僾扨懱偩偗偱側偔 $99 偺奐敪僉僢僩傪峸擖偡傞偙偲偑弌棃傑偡丅偙偺奐敪僉僢僩偼傾僙儞僽儔偲昡壙斉偺俠僐儞僷僀儔偑摨崼偝傟丄GND 娷傔偰俁杮 CPU 偲寢慄傪偡傞偩偗偱丄僔儕傾儖傾僟僾僞傪夘偟偨僆儞僠僢僾僨僶僢僈偵傛傞僜乕僗僐乕僪僨僶僢僌偑壜擻偵側傝傑偡丅偙傟偼傕偆悽奅拞偺儅僀僐儞栰榊偼懄攦偄儌僲偱偡偹偊丅崙撪偱偼嶰梞偑斕攧傪偟偰偍傝丄偙偪傜傕 Web 儁乕僕偐傜峸擖偡傞偙偲偑弌棃傞傛偆偱偡丅
偙偺 CPU 偺戝偒側寚揰偼丄僴儞僟晅偗偺擄偟偝偱偡丅僠僢僾昞柺偵 0.5mm 娫妘偱暲傋傜傟偨暆 0.23mm 偺揹嬌傊偺寢慄偑梫媮偝傟傑偡丅CPU 傪侾偮庼嬈戙偵廩偰偨偍偐偘偱宱尡抣傪摼傞偙偲偑弌棃丄傛偆傗偔儐僯僶乕僒儖婎斅忋傊偺庢傝晅偗偑弌棃傞傛偆偵側傝傑偟偨丅巹偑庢偭偨曽朄偼師偺傛偆側傕偺偱偡丅傑偢 CPU 傪儐僯僶乕僒儖婎斅偺晹昳柺忋偵壖屌掕偟傑偡丅億儕僂儗僞儞慄(UEW)傪梊旛僴儞僟偟丄婎斅忋偺寠傪娧捠偝偣偨忬懺偱丄梊旛僴儞僟偟偨 CPU 抂巕偵壖巭傔傪偟傑偡丅UEW 偑娧捠偟偰偄傞寠偺儔儞僪晹暘傪僴儞僟晅偗偟偰 UEW 傪屌掕偟丄傕偆堦搙 CPU 偺揹嬌偵偠偭偔傝偼傫偩僐僥傪偁偰偰丄妋幚偵僴儞僟晅偗傪峴偄傑偡丅偦偟偰儔儞僪柺懁偺 UEW 偺堦抂傪梊旛僴儞僟偟偰丄懠偺晹昳偲寢慄偟傑偡丅僉儌偼丄擛壗偵 UEW 傪屌掕偟偰 CPU 偲僴儞僟晅偗偡傞偐丄堦搙 CPU 偲僴儞僟晅偗偟偨傜摦偐偝側偄傛偆偵偡傞偐丄偩偲巚偄傑偡丅
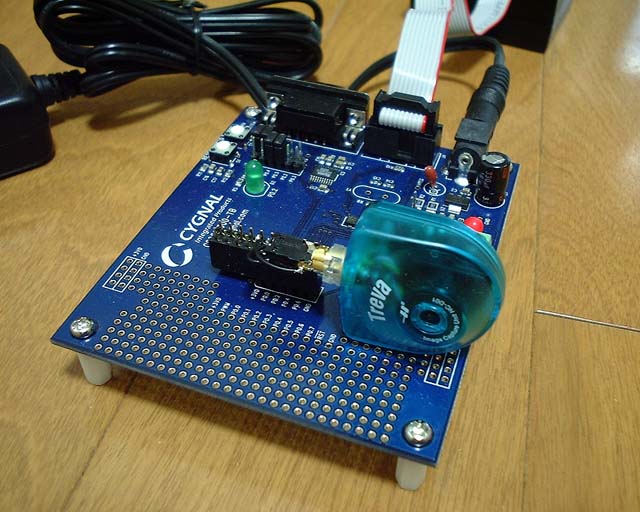
 偝偰僨僕俻偵 C8051F300 傪搵嵹偟偰傒傑偡丅傑偢揹尮偱偡丅擸傫偩枛偵丄徃埑偝傟偨 5V 庛偺揹埑傪 3.3V 梡俁抂巕儗僊儏儗乕僞 NJM7202 偱 3.3V 偵棊偲偟偨傕偺傪嫙媼偟傑偟偨丅儌乕僞僪儔僀僶偲偼 P0.0乣P0.3 偺 I/O 億乕僩傪丄儌乕僞僪儔僀僶 LB1836M 偺 IN1乣IN4 偵愙懕偟傑偡丅寢慄偼庢傝奜偟偨搶幣 CPU 偺揹嬌傪夘偡傞偺偑娙扨偱偡丅僨僶僢僈愙懕梡偵 P0.7 偲 RST 偲 GND 偺俁杮傪僗僥儗僆僕儍僢僋偵愙懕偟傑偟偨丅廩揹梡偵嬌惈摑堦僕儍僢僋傪婎斅忋偵屌掕偟丄僨僕俻惂屼婎斅忋偺廩揹抂巕僴儞僟晹暘偵僺儞僿僢僟傪庢傝晅偗偰丄CPU 婎斅傪偙偙偵嵎偟偰屌掕偟傑偟偨丅
偝偰僨僕俻偵 C8051F300 傪搵嵹偟偰傒傑偡丅傑偢揹尮偱偡丅擸傫偩枛偵丄徃埑偝傟偨 5V 庛偺揹埑傪 3.3V 梡俁抂巕儗僊儏儗乕僞 NJM7202 偱 3.3V 偵棊偲偟偨傕偺傪嫙媼偟傑偟偨丅儌乕僞僪儔僀僶偲偼 P0.0乣P0.3 偺 I/O 億乕僩傪丄儌乕僞僪儔僀僶 LB1836M 偺 IN1乣IN4 偵愙懕偟傑偡丅寢慄偼庢傝奜偟偨搶幣 CPU 偺揹嬌傪夘偡傞偺偑娙扨偱偡丅僨僶僢僈愙懕梡偵 P0.7 偲 RST 偲 GND 偺俁杮傪僗僥儗僆僕儍僢僋偵愙懕偟傑偟偨丅廩揹梡偵嬌惈摑堦僕儍僢僋傪婎斅忋偵屌掕偟丄僨僕俻惂屼婎斅忋偺廩揹抂巕僴儞僟晹暘偵僺儞僿僢僟傪庢傝晅偗偰丄CPU 婎斅傪偙偙偵嵎偟偰屌掕偟傑偟偨丅
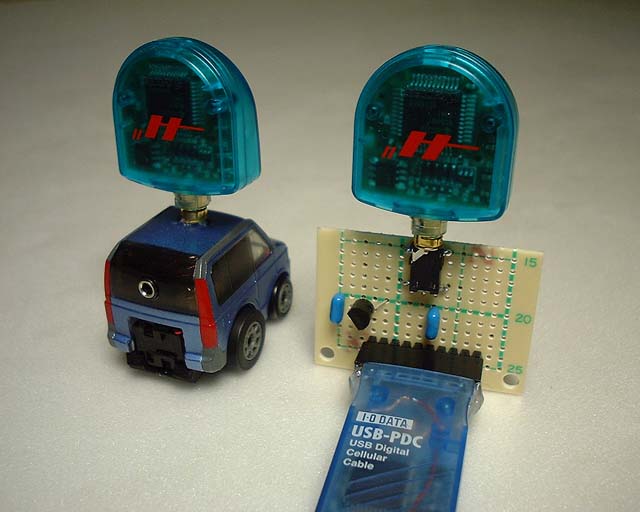
 師偼 Treva 偺搵嵹偱偡丅徏壓偺 feel H" 抂枛 KX-HS100 偺儌僢僋傾僢僾偐傜庢傝奜偟偨係嬌僺儞僕儍僢僋傪廩揹抮偺慜偵椉柺僥乕僾偱屌掕偟傑偟偨丅嵟弶偼僺儞僕儍僢僋傪忋偵岦偗偰偄偨偺偱偡偑丄恻梋嬋愜偺枛丄尒偰偔傟廳帇偱忋壓斀懳偲側傝傑偟偨丅Treva 偲 C8051F300 偲偺寢慄偼丄Treva 偺 DOUT 傪 P0.5 偲丄CLKIN 傪 P0.4 偲寢慄偡傞偩偗偱偡丅Treva 偺揹尮偵偼 3.3V 俁抂巕儗僊儏儗乕僞偺弌椡傪嫙媼偟傑偟偨丅
師偼 Treva 偺搵嵹偱偡丅徏壓偺 feel H" 抂枛 KX-HS100 偺儌僢僋傾僢僾偐傜庢傝奜偟偨係嬌僺儞僕儍僢僋傪廩揹抮偺慜偵椉柺僥乕僾偱屌掕偟傑偟偨丅嵟弶偼僺儞僕儍僢僋傪忋偵岦偗偰偄偨偺偱偡偑丄恻梋嬋愜偺枛丄尒偰偔傟廳帇偱忋壓斀懳偲側傝傑偟偨丅Treva 偲 C8051F300 偲偺寢慄偼丄Treva 偺 DOUT 傪 P0.5 偲丄CLKIN 傪 P0.4 偲寢慄偡傞偩偗偱偡丅Treva 偺揹尮偵偼 3.3V 俁抂巕儗僊儏儗乕僞偺弌椡傪嫙媼偟傑偟偨丅
偙偺傑傑偱偼慜椫偑柍偄偺偱僔儍乕僔壓柺偑愙抧偟偰偟傑偄傑偡丅儃僨傿屌掕梡偺僱僕寠偵丄搶媫僴儞僘偱峸擖偟偨偡傋傝昬傪嵎偟偰傒傑偟偨丅偙偺帪偡傋傝昬傪愺偔嵎偡偙偲偱慜曽傪帩偪忋偘傑偟偨丅偙傟偵傛傝廳怱偑懡彮屻傠偵側傝丄嬱摦椫偺愙抧杸嶤傪岦忋偝偣傞偙偲偑弌棃傑偟偨丅
儃乕儖捛愓
 姰惉偟偨戜幵傪摦偐偟偰傒傑偟傚偆丅偲傝偁偊偢儚儞僷僞乕儞偱偡偑僥僯僗儃乕儖捛愓偱梀傫偱傒傞偙偲偵偟傑偡丅傑偢偼 TinyH8 偺帪偲摨偠傛偆偵 C8051F300 扨懱偱 Treva 偐傜偺夋憸庢傝崬傒偲僥僯僗儃乕儖擣幆傪僥僗僩偟偰傒傑偡丅昡壙儃乕僪偵 Treva 傪庢傝晅偗丄僔儕傾儖億乕僩傪捠偠偰 TinyH8 偺帪偵嶌惉偟偨PC 僜僼僩偵夋憸僨乕僞傪揮憲偟傑偡丅帋偟偵僼儗乕儉儗乕僩傪應偭偰傒偨強丄僥僯僗儃乕儖擣幆傪娷傔偰栺 6fps 偲偄偆寢壥偑摼傜傟傑偟偨丅24.5MHz 摦嶌偺埿椡愨戝偱偡丅
姰惉偟偨戜幵傪摦偐偟偰傒傑偟傚偆丅偲傝偁偊偢儚儞僷僞乕儞偱偡偑僥僯僗儃乕儖捛愓偱梀傫偱傒傞偙偲偵偟傑偡丅傑偢偼 TinyH8 偺帪偲摨偠傛偆偵 C8051F300 扨懱偱 Treva 偐傜偺夋憸庢傝崬傒偲僥僯僗儃乕儖擣幆傪僥僗僩偟偰傒傑偡丅昡壙儃乕僪偵 Treva 傪庢傝晅偗丄僔儕傾儖億乕僩傪捠偠偰 TinyH8 偺帪偵嶌惉偟偨PC 僜僼僩偵夋憸僨乕僞傪揮憲偟傑偡丅帋偟偵僼儗乕儉儗乕僩傪應偭偰傒偨強丄僥僯僗儃乕儖擣幆傪娷傔偰栺 6fps 偲偄偆寢壥偑摼傜傟傑偟偨丅24.5MHz 摦嶌偺埿椡愨戝偱偡丅
 師偵僨僕俻儌乕僞惂屼晹暘偺専摙偱偡丅僞僀儅妱崬傒傪巊偭偰俉抜奒偺 PWM 傪幚憰偟丄懍搙傪壜曄偱偒傞傛偆偵偟傑偟偨丅幚嵺偵摦偐偟偰傒傞偲丄2/8乣3/8 偲偄偭偨 Duty 斾偱傛偆傗偔惂屼偱偒偦偆側懍搙偵側傝傑偟偨丅傑偨曅曽偺 PWN Duty 斾傪堦掕娫妘偱憹壛偝偣傞曗惓張棟傪慻崬傒丄捈恑惈傪岦忋偝偣傑偟偨丅
師偵僨僕俻儌乕僞惂屼晹暘偺専摙偱偡丅僞僀儅妱崬傒傪巊偭偰俉抜奒偺 PWM 傪幚憰偟丄懍搙傪壜曄偱偒傞傛偆偵偟傑偟偨丅幚嵺偵摦偐偟偰傒傞偲丄2/8乣3/8 偲偄偭偨 Duty 斾偱傛偆傗偔惂屼偱偒偦偆側懍搙偵側傝傑偟偨丅傑偨曅曽偺 PWN Duty 斾傪堦掕娫妘偱憹壛偝偣傞曗惓張棟傪慻崬傒丄捈恑惈傪岦忋偝偣傑偟偨丅
埲慜嶌偭偨儃乕儖捛愓僜僼僩偺斀徣傪妶偐偟丄崱夞偼忬懺慗堏悢傪憹傗偟偰儃乕儖傪尒幐偭偰傕偦傟傜偟偄摦偒傪偡傞傛偆偵偟偰尒傑偟偨丅偙偺晹暘偺僾儘僌儔儈儞僌偑崱夞堦斣妝偟偄傂偲偲偒偱偟偨丅傗偼傝埨掕偟偨戜幵傪梡堄偟偰丄偦偺摦偒傪峫偊傞偺偼儅僀僐儞栰榊偺戠岉枴偲偄偊傞偱偟傚偆丅
 偙偺僒僀僘偺帺棩堏摦儘儃僢僩傪帺暘偑偙傫側偵偍庤寉偵嶌惉偱偒傞傛偆偵側傞偲偼憐憸傕偟偰偄傑偣傫偱偟偨丅傕偼傗 Treva 偡傜戝偒偔姶偠傜傟傑偡丅尰嵼偺栤戣揰偼廩揹曽朄偱偡丅偲傝偁偊偢 5V 傾僟僾僞傪廩揹抂巕偵捈寢偟偰偄傑偡偑丄偡偖偵廩揹抮偑擬偔側偭偰偟傑偄傑偡丅偙偺曈偺栤戣傪僋儕傾偟丄偝傜偵徚旓揹椡傪掅尭偝偣偮偮丄師側傞栚昗偵岦偐偭偰僜僼僩偱妝偟傒偨偄偲巚偭偰偄傑偡丅
偙偺僒僀僘偺帺棩堏摦儘儃僢僩傪帺暘偑偙傫側偵偍庤寉偵嶌惉偱偒傞傛偆偵側傞偲偼憐憸傕偟偰偄傑偣傫偱偟偨丅傕偼傗 Treva 偡傜戝偒偔姶偠傜傟傑偡丅尰嵼偺栤戣揰偼廩揹曽朄偱偡丅偲傝偁偊偢 5V 傾僟僾僞傪廩揹抂巕偵捈寢偟偰偄傑偡偑丄偡偖偵廩揹抮偑擬偔側偭偰偟傑偄傑偡丅偙偺曈偺栤戣傪僋儕傾偟丄偝傜偵徚旓揹椡傪掅尭偝偣偮偮丄師側傞栚昗偵岦偐偭偰僜僼僩偱妝偟傒偨偄偲巚偭偰偄傑偡丅
-
C8051F300 梡 Treva 夋憸揮憲僜僼僩 (8KByte LZH 埑弅)
-
C8051F300 梡僥僯僗儃乕儖捛愓僜僼僩 (9KByte LZH 埑弅)





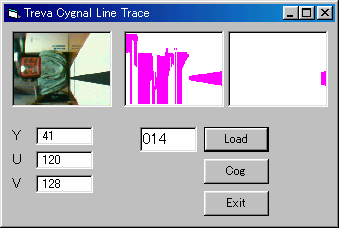 偝偰庢摼偟偨夋憸僨乕僞傪専摙偡傞帠偵偟傑偡丅椺偵傛偭偰 VisualBasic 偱嶌惉偟偨張棟曽朄専摙梡僾儘僌儔儉傪巊梡偟偰丄張棟曽朄傪専摙偟偰傒傑偡丅
偝偰庢摼偟偨夋憸僨乕僞傪専摙偡傞帠偵偟傑偡丅椺偵傛偭偰 VisualBasic 偱嶌惉偟偨張棟曽朄専摙梡僾儘僌儔儉傪巊梡偟偰丄張棟曽朄傪専摙偟偰傒傑偡丅