![]() ラジコンサーボモーターの概要
ラジコンサーボモーターの概要
ラジコンサーボの中
ロボット用にラジコンサーボが使用されるようになってから品種も大幅に増え、様々なメーカーから発売されています。
下図はラジコンサーボを上から見た図(左)と上部を開けた図(右)です。御覧の通り上部はギアボックスとなっています。
下図は下側のケースを開けたところです。中にはモーターとポテンションメータと制御基板が入っています。
左の写真でモーターとポテンションメータとギアボックスの関係が分かると思います。
モーターが回転するとモーター軸に取り付けられたピニオンギアからギアボックスに回転が伝達されます。ギヤボックスは減速ギアになっていますので、小さなギアが何回転もして大きなギアを一回転させることを数段重ねて減速しています。テコの原理と同じで支点から遠い方が少ない力で動かすことができるので、減速比が大きいほどトルクが高くなります。
減速された回転はサーボ軸に取り付けたサーボホーンによって飛行機のラダーやエレベータに接続されて動作します。そのサーボ軸にはポテンションメータが接続されており、サーボ軸の回転が電気抵抗の変化として制御回路に戻ります。
サーボを分解すると故障の原因になりますので避けたほうがよいでしょう。
制御信号
ラジコンサーボには3本の線が出ています。写真で紹介したFutabaの場合、白い線が信号線で、赤が電源、黒がGNDです。
電源電圧は4.8Vから6.0Vです。乾電池4本で6V、ニッカド電池4本で4.8Vなのでこのようになっています。
信号線の信号はラジコンの受信機からはLOWは0vでHiは3vになっています。Hi側の電圧は電源電圧を越えなければ良いので
マイコンの電源と共通の5Vで使えば問題ありません。
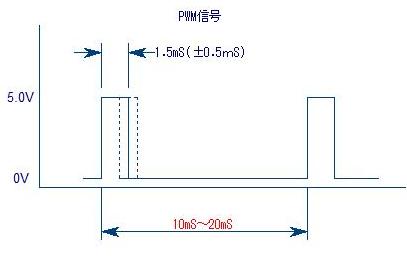
上の図がPWMサーボ制御信号です。周期はメーカーや機種により違いますが10mSから20mSです。
サーボの動作角はパルス幅で決まります。ニュートラルはメーカーにより違いますが1.50mSか1.52mSです。
制御範囲は±500uSで回転角±60°となっています。実際には送信機側でトリムの微調整や可変範囲の微調整ができるようになっていますので回転角は±90°程度動くことが可能ですが機種によって様々です。