[概念図] - 極軸が北及び東にズレている場合
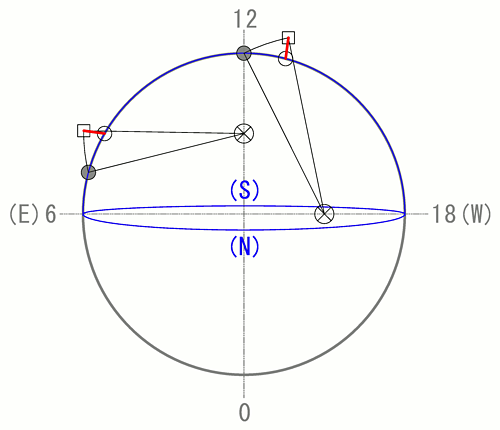
- 南向き正立像(北が上の場合の写野)
- 時角数値は、東西方位と不一致
極軸のズレ方向は、この時角に合わせる
すなわちズレが東の場合は18、西は6、南(上)は0、北(下)は12 - 画像中央部の鎖線交差位置が真極軸
- ○に×は赤道儀の極軸(回転軸)の位置
- ●は追尾開始時の恒星の位置、○は追尾終了時の恒星位置
- □は追尾終了時の赤道儀の位置
- 赤線は恒星の軌跡
極軸に誤差がある場合、仮にピリオディックモーションエラーが無かったとしても、一定時間以上追尾すると誤差が生じてくる。 ノータッチガイドや一軸オートガイドをする場合には、このことが問題となってくる。
[概念図] - 極軸が北及び東にズレている場合
要するに極軸の設置誤差があるということは、星の日周運動の回転軸と、赤道儀の回転軸がズレている状態である。
同一の赤緯でも、追尾しようとする恒星の時角によって、赤道儀の回転する円の大きさ(天空上の仮想円)が変わってくる。
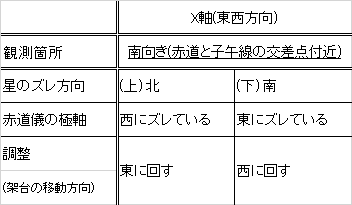
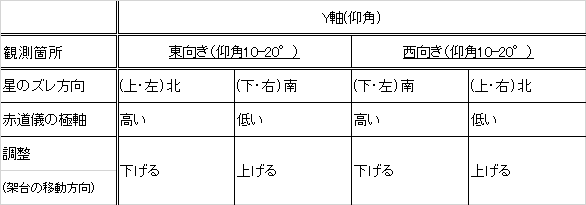
これをドリフト法で修正する場合は、以下のようになる。
天文年鑑(2015年版)の巻末資料(P320)に「極軸の設定誤差による追尾誤差(著者:西條善弘)」という記事がある。 内容は以下の通りである。
■極軸の設定誤差による追尾誤差赤道儀の極軸方向が、天の極に対して、時角Ηpの方向に角距離εpの大きさの据付け誤差がある時、赤緯δ、時角Ηの位置にある天体をt時間追尾した後の、時角方向の追尾角距ΔΗ、赤緯方向の追尾誤差の角距離Δδは以下の式で表わされる。 (注;Η、Ηp、tはhms単位なので、実際に計算を行うときは、「°」単位に直す。)
Η' = Η - Ηp全体での追尾誤差の角距離Δεの余弦は
ΔΗ = εp tanδ(sin(Η' + t) - sin(Η'))
Δδ = εp(cos(Η' + t) - cos(Η'))
cosΔε = sinδ sin(δ + Δδ) + cosδ cos(δ + Δδ)cosΔΗで与えられるので、焦点距離fの望遠鏡での像面での星像の流れの大きさΔdは以下の式で表わされる。
Δd = f tanΔεこの式を逆に利用すると、天体の追尾誤差から極軸を修正する方向と量がわかる。