
6台目のレースロボット
昨年のデジQを改造して作ったロボットとほぼ同じ構成のロボットです。昨年完走できたのでソフトの改良で速度アップめざしました。しかし、残念ながらあまり速くはなりませんでした。
ハードの改良点として、センサをパルス点灯方式として電力の節約を図っています。こちらは上手くいきました。センサ感度の向上もみられました。

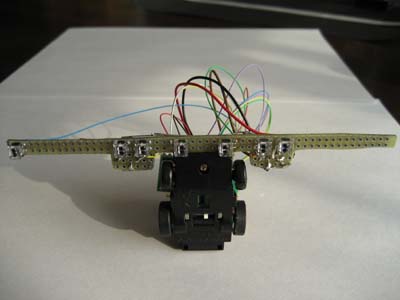
今回は前回とほぼ同じ構成で作成しています。センサは昨年と同じで7個と
してその配置も同じにしました。CPUも昨年と同じトラ技の付録のR8C/Tinyの
基板を使用しています。大きく変えたのはセンサを昨年の常時点灯から
パルス点灯方式に変えたことです。電池の持ちが悪いのでなんとか改善しようと
考えていたのですが、センサの赤外線LEDの点灯にモータと同じ位の電力を
消費しているようなので、ここを節約することが考えました。
電池については、リチュウムポリマー電池を使うことを最初考えていたので
すが、小型のものを手に入れることができませんでした。結局以前に
入手していたデジQ付属のものより一回り大きいニッケル水素電池を
追加で乗せることで対応しました。
電池に関しては、小型のものは電動プレーン用のものがいろいろあることは
分かっていたのですが、秋葉原にあった空もの専門のラジコン店
「ラジコンショップ アサミ」
が閉まってしまったので、入手できなくなってしまったのです。何件か
ラジコン店を回ってみたのですが、電動については自動車関連に力を入れている
お店が多く、電動プレーン用の電池は入手できませんでした。今は通信販売で
探すしかないかなあと思っています。
ほぼ前回のロボットと同じ構成なので前回のものを改造して使うことも
考えたのですが、最終的には新しいロボットを作りました。CPUボードだけ
流用するとかの選択もあったのですが、結構沢山トラ技を買っておいたので
CPUボードも沢山あったのでCPUボードも新しいものを使いました。しかし、
せっかく新しく作ったのになにも新規の工夫はなく、前回とまったく同じ
CPU部にしてしまったのはちょっと反省しています。
実はCPU部は、新しくR8C/Tinyを使ってプリント基板を作成して作りたいと
考えていたのですが、時間がたりず断念しました。
 さて、ロボットの製作は一度つくったものなのですんなり進みました。
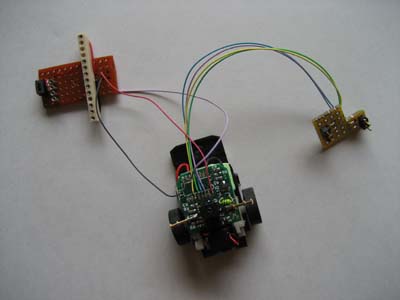
今回は新しく千石電商で入手した極細線を使用しました。
おかげで少しセンサ部分がすっきりしました。もう少し極細線の色の種類が
あると良かったのですが、足りない部分は従来使っていたリボンケーブルの
線を一本づつ割いたものを使いました。
さて、ロボットの製作は一度つくったものなのですんなり進みました。
今回は新しく千石電商で入手した極細線を使用しました。
おかげで少しセンサ部分がすっきりしました。もう少し極細線の色の種類が
あると良かったのですが、足りない部分は従来使っていたリボンケーブルの
線を一本づつ割いたものを使いました。
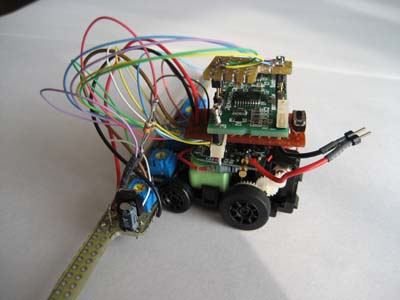 写真ではまだ着いていませんが、この後ろの部分にアルミ板を曲げてニッケル水素電池2個を乗せます。電圧は元々のデジQ付属のものと同じ2.4Vです。容量は220mAhです。この電池をデジQ付属のものと並列に接続しました。つなぎ方としては乱暴なんですが、問題なく動いています。
写真ではまだ着いていませんが、この後ろの部分にアルミ板を曲げてニッケル水素電池2個を乗せます。電圧は元々のデジQ付属のものと同じ2.4Vです。容量は220mAhです。この電池をデジQ付属のものと並列に接続しました。つなぎ方としては乱暴なんですが、問題なく動いています。
本当はデジQ付属のものは取り外して付け直したかったのですが、構造的に簡単に乗せ換えができなかったので、安易に並列接続してしまいました。昨年の2つの電池を積んだので重さが増えることの心配はしていませんでした。
さて結果ですが、途中で止まってしまってリタイヤとなりました。昨年よりコースが難しくなっているような気がします。距離は間違いなく伸びたと思います。
途中で止まった原因ですが、以前のようにコースのどこかに引っかかったのではなく、ソフトのバグによって止まったと考えています。速度を上げるために前日に前のセンサの状態によって同じセンサの値でも動作を変えるようにプログラムを急きょ変更したのです。あまり速度向上には役に立たなかったようですが、そのまま使用しました。急きょ変更したものなので直前のテストの時も原因がよくわからないまま停止することがありました。おそらく同じような原因で止まったのだと思います。テストを十分に出来ていないので大きなバグが残っていたのでしょう。まあ、それはしかたがありません。
今回ソフトを工夫してなんとか速度を上げようとしましたがあまり上手く行きませんでした。単純にフルパワーでモータを回すとかなり速く走るので、もう少しなんとかならないかと思っていますが、このハード構成では難しいかなと思い始めています。
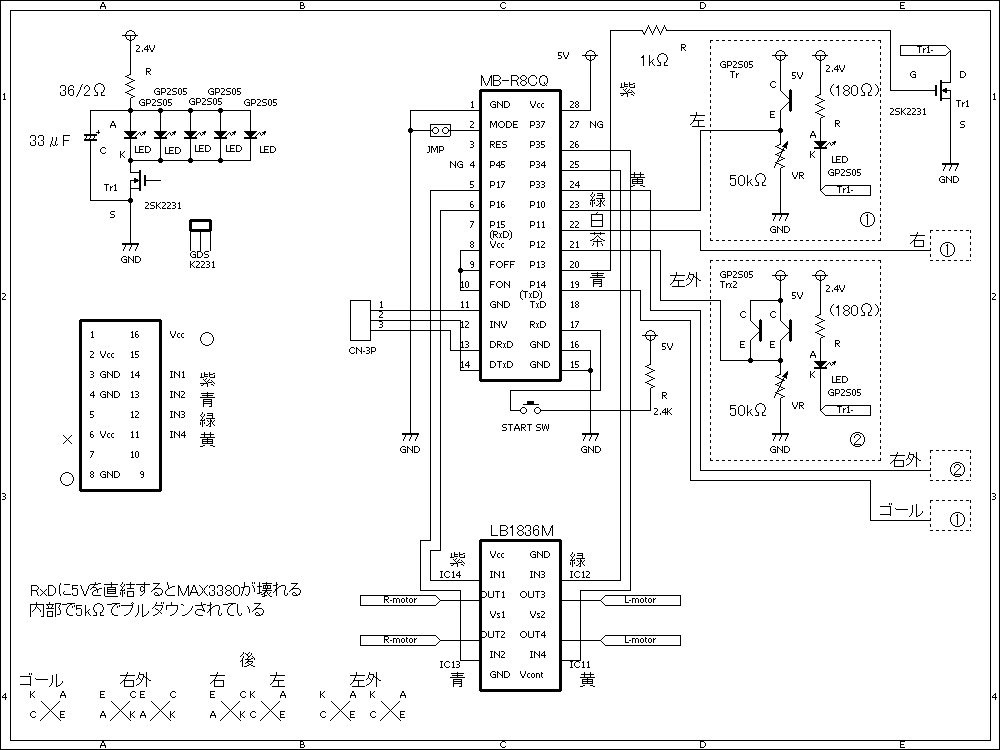
大会出場時の回路をおいておきます。できるだけ余計な
部品はなくしましたのでシンプルなものになっています。
(2007年9月15日変更)
2008年9月3日に追加
2007年はソフトの改善だけで望みました。前のセンサの状態によって同じセンサの値でも動作を変えることは引き続き行いましたが、あまり効果はなかったように感じます。
今回完走できたのは、本番に近いコースで沢山テストを行った結果だと思っています。
変更したのはほとんど速度関連のパラメータのみでした。1年経っているためか、CPUとの通信が不安定で半分以上エラーでソフトの書き込みを失敗していたような気がします。
多分接触不良の類が原因だと思います。それにもめげずに名古屋の地方大会と全国大会の試走の時に何度もコースを走らせて調整したのが良かったようです。
ただ結果的に速度アップはできていません。昨年より少し遅くなっていると思います。その代わり走りは非常に安定しました。おそらく、今回予選のコースと同程度の難易度のコースなら制限時間を無視すれば8割以上の確率で完走できると思います。残念なのは決勝のコースを走らすことが出来なかったことです。今回は撤去が早く決勝のレース後にコースを走らせて見ることが出来ませんでした。
ホーム
一つ戻る
{kind=link}