
5台目のレースロボット
昨年のデジQを改造して作ったロボット同じようにデジQを改造したものです。
しかし、大幅に構成を変えています。まず、センサを昨年の4個から7個に
増やしています。より広い範囲を見ることができればそれだけ速度を上げる
ことが可能だと考えたからです。しかし、実際はそんなに簡単にはいかない
ようです。次にCPUをPICからトラ技の付録のR8C/Tinyに変えました。
一番大きな理由はセンサの数を増やしたのでポートが沢山必要になったから
です。しかし、トラ技の付録のR8C/Tinyでもポート数は十分ではありません
でした。

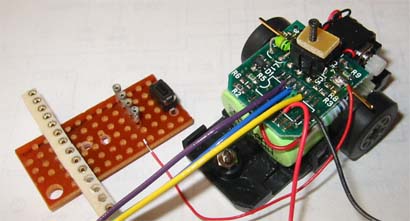
前回同様に作成の課程を紹介します。基本的な構成の考え方は変えていません。
デジQの基本的な部分は利用しています。前回同様デジQの基板からCPUを
外して、そこから5Vの電源を取り出して使用しています。また、モータを
回すドライバICもそのまま使用していますので、CPUを取ったあとの
パターンから信号線を引き出しています。今回はポート数が増えたので
逆回転もできるように信号線を引き出しました。実際は前進と停止しか
使用していません。まあ、ソフトを十分に作り込むだけの時間がなかった
ので、あまりいろいろ試していないというのが正直なところです。
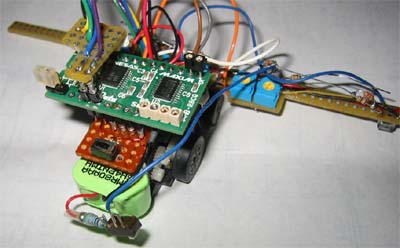
トラ技の付録のCPUは通信用の232CのICやリセット回路などの周辺回路が
乗ったCPU基板になっています。28ピンICと同じ大きさになっているので、
そのままデジQの上に乗せるのにはちょっと大きめです。そこで、一つ
基板を間にかませて、横長に乗せることにしました。このとき足の一部は
基板にささりませんが、必要な信号は空中配線で取り出したり、CPU基板の
上にソケットピンを半田付けして取り出したりしています。
写真は信号線を引き出したところとCPU基板を乗せる中間の基板です。
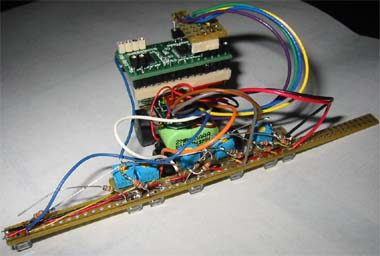
今回センサの数を7個にしています。ただポートの数が足りなかったので
外側のセンサは2個をオープンコレクタを利用したOR接続として、5個の
センサとして使用しています。
内側に前のロボット同じ間隔で2個のセンサを置いています。これで
ラインをセンスしてラインに沿って動かします。その外側に2個、左右で
4個のセンサを置いてます。このセンサは2個をオーブンコレクタで
つないで1つのポートに入力しています。つまり2個のセンサのうち
どちらかでラインをセンスするとポートに信号が入力されます。幅が広い
センサが1個あるのと同じ効果になります。この外側のセンサでラインを
大きく外れたかを見るわけです。そして、一番外側にゴールセンサが
1個、これでゴールマーカを見つけて停止ます。今回は十字路センサは
ありません。4個(実態は6個)のラインセンサの検知パターンから
十字路かどうかを判断しています。
今回センサの数が増えたことで一番苦労したのが電源でした。
もともとデジQについてるものでは、本当にすぐになくなってしまって
ほとんど使い物になりませんでした。そこで、センサの赤外線LED点灯用
の電池を別にしました。これは別のデジQの電池とスイッチを外して
車体の後ろに両面テープで取り付けました。これで何とか3分間動作
させることができるようになりました。
 しかし、電池の持ちの悪さは問題でした。ソフトのデバックの効率が
ものすごく悪いのです。いろいろパラメータなど変更して試そうと
してもすぐに電池がなくなってテストできません。また、走っている
内に電池の電圧が下がってきて速度も変化してしまいます。おかけで
あまり動作テストをすることができませんでした。また、3分間同じ
速度で走ることも難しい状態でした。最初にコースをトレースできる
速度に設定しておくと、途中で電池の電圧が下がって遅くなってしまう
のです。遅くなることを見越して最初速めに設定しておくと、速度が
速すぎてカーブを曲がり切れなかったりします。
しかし、電池の持ちの悪さは問題でした。ソフトのデバックの効率が
ものすごく悪いのです。いろいろパラメータなど変更して試そうと
してもすぐに電池がなくなってテストできません。また、走っている
内に電池の電圧が下がってきて速度も変化してしまいます。おかけで
あまり動作テストをすることができませんでした。また、3分間同じ
速度で走ることも難しい状態でした。最初にコースをトレースできる
速度に設定しておくと、途中で電池の電圧が下がって遅くなってしまう
のです。遅くなることを見越して最初速めに設定しておくと、速度が
速すぎてカーブを曲がり切れなかったりします。
そこで、内部で時間を計測して、一定時間経過すると速度パラメータを
あげて、電池の消耗による速度低下を抑えるようにしました。結果的に
この方法を取ったおかげで完走できたのではないかと考えています。
さて今回は作成に手間取って、中部地区大会には参加できませんでした。
ぶっつけ本番でした。
結果は一回目の走行で2分ほどかかって完走しました。ゴールマーカーを
検知してすぐにとまってしまったためにゴールゲートを完全に通過して
いない可能性があったのですが、観客の拍手のおかげでOKとなりました。
2度目の走行は、行いませんでした。時間的に完走できる可能性がなかった
からです。しかし、後で振り返ってみて時間一杯まで走らせるべきだったと
後悔しています。
前に述べたように時間の経過とともに速度パラメータをあげているので、
電池の消耗具合との関連で二回目走行では見た目速度アップしたように
見えたはずです。ただ小さいだけではないことをアピールできたのでは
ないかと思ったのです。
 このあたり、出場経験や完走の経験があまりないことが影響していると
感じます。完走したことで満足してしまって、それ以上の挑戦をしなかった
とみることもできるからです。二回目走行で速度アップが予想通りに
いかなくても、走らせることでそれなりに得るものがあったはずです。
その面では少し悔いが残りました。
このあたり、出場経験や完走の経験があまりないことが影響していると
感じます。完走したことで満足してしまって、それ以上の挑戦をしなかった
とみることもできるからです。二回目走行で速度アップが予想通りに
いかなくても、走らせることでそれなりに得るものがあったはずです。
その面では少し悔いが残りました。
ただ完走できたことは非常にうれしかったです。ただかなり速度をあげないと
決勝へでることは難しいこともわかりました。タイムを半分にしても
決勝進出は無理なのです。これはかなり厳しいハードルです。
CPUをPICからトラ技の付録のR8C/Tinyに変えたことでポート数は増えたのですが、
それでもまだ十分ではありませんでした。前回と同様にセンサの調整用の
LEDをつける余裕がありませんでした。そこで今回も調整時にだけLEDを取り付ける
ようにしました。今回は、CPUごと取り替えるのではなく、モータコントロール用の
ポートを調整時にはセンサの状態出力に使うことにしました。そこで
モータコントロール用のポートの端子はソケットにして取り外しできるように
しました。センサ調整時はここをLED点灯用のドライバICとLEDをつけた基板に
取り替えて使います。センサは5個でポートが4個なのでゴールセンサは
2つのLEDを点灯させることで判断できるようにしています。
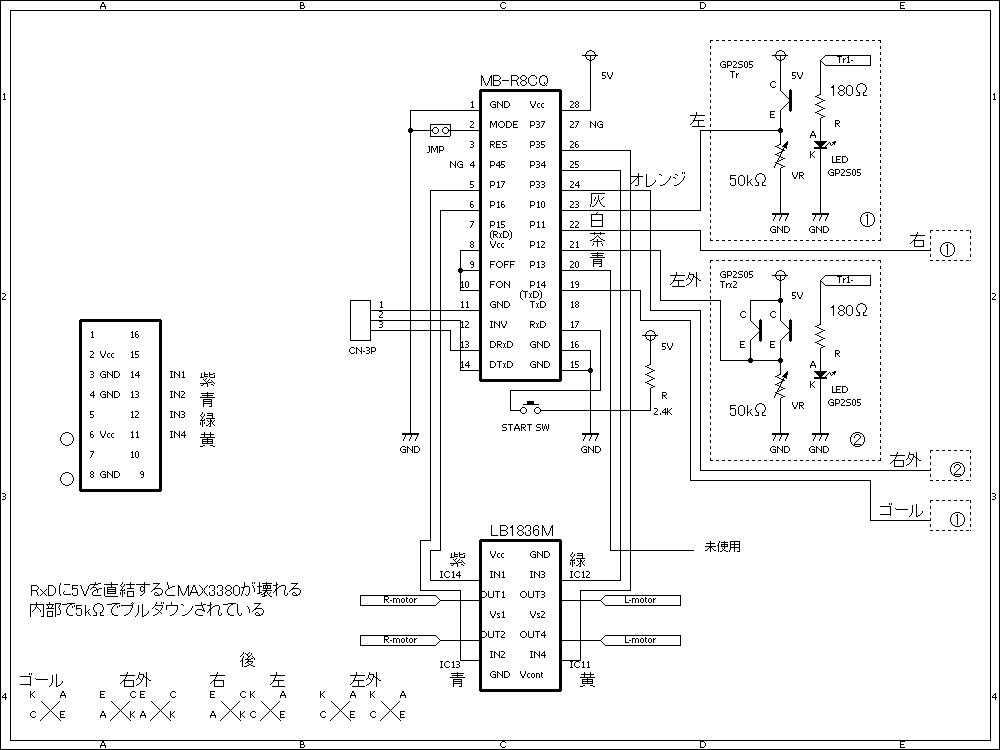
大会出場時の回路をおいておきます。できるだけ余計な
部品はなくしましたのでシンプルなものになっています。
ホーム
一つ戻る
{kind=link}