僨僕僞儖幃懍搙寁仌夞揮寁乮僞僐儊乕僞乯偺惢嶌 |
俽倂俀侽偺儊乕僞乕椶偼彮偟尒擄偄姶偠偑偟傑偡丅僂僀儞僪丒僼傿儖儉傪揬偭偨偣偄偐丄擔拞偱傕僒儞僌儔僗側傫偐偟偰偄傞偲丄儊乕僞乕廃曈偑埫偔偰撉傒擄偄傛偆偱偡丅傑偨丄傾僀億僀儞僩傪崅傔偵拝嵗偡傞偲丄儊乕僞乕偑壓偺曽偵尒偊偰尒擄偔姶偠傑偡丅偦偙偱丄僨僕僞儖幃偺懍搙寁仌夞揮寁傪嶌偭偰丄僟僢僔儏儃乕僪偺忋偵抲偔偙偲偵偟傑偟偨丅
傑偨丄俁俽亅俧俤偼儗僢僪僝乕儞傑偱婥帩偪傛偔壛懍偟偰偔傟傑偡丅偍偐偘偱丄儕儈僢僞偑妡偐傞俈係侽侽倰倫倣傑偱僄儞僕儞傪夞偟偰偟傑偆偙偲傕帪愜偁傝傑偡丅媡偵丄奨忔傝偱偼丄僴僀丒僊傾乕偱掅偄夞揮悢偐傜壛懍傪妡偗偰偟傑偄丄幐懍偡傞偙偲傕帪愜偁傝傑偡丅偦偙偱丄僩儖僋僶儞僪偑柧妋偵暘偐傞傛偆偵丄僶乕僌儔僼幃偺夞揮寁傕崌傢偣偰憰旛偡傞偙偲偵偟傑偟偨丅
嵟廔峏怴擔 丗 侾俋俋俋丏俋丏侾侾
摿挜偵偮偄偰 |
愝寁偵嵺偟偰偼埲壓偺傛偆側梫審偵懳墳偱偒傞傛偆偵峫偊傑偟偨丅
昞帵偺撪梕 |
挿乆偟偨愢柧傪彂偔傛傝丄壓偺幨恀傪尒偰捀偗傟偽丄偳傫側憰抲側偺偐丄偒偭偲偡偖暘偐傞偱偟傚偆丅
 |
傾僀僪儕儞僌忬懺 |
 |
奨拞偱偼晛捠偙偺曈傑偱 |
 |
僩儖僋偑嵟傕懡偄夞揮悢 |
 |
儕儈僢僞偑岠偔捈慜 |
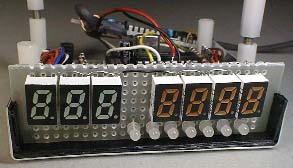
昞帵偼忋偺幨恀偺傛偆偵側傝傑偡丅敀偭傐偄乽侽乿偼懍搙寁偱侽倠倣乛倛偱偡丅愒乮幚偼庨怓乯偑僞僐儊乕僞偱俉侽侽乣俈俁侽侽倰倫倣傪帵偟偰偄傑偡丅壓偺椢乣愒偺僶乕僌儔僼傕僞僐儊乕僞偵側偭偰偄傑偡丅奨拞偱偼慡晹椢怓偱廔巒偡傞掱搙偟偐僄儞僕儞傪夞偟傑偣傫丅俁俆侽侽乣俈侽侽侽倰倫倣傑偱偼僩儖僋僶儞僪偱丄僗億乕僣憱峴側傜丄墿偺僶乕僌儔僼偑弌偰偄傞斖埻偵僉乕僾偡傞偺偑朷傑偟偄偱偟傚偆丅嵟屻偺愒偼儗僢僪僝乕儞傪偁傜傢偟傑偡丅愒偄俴俤俢偑揰偐側偄傛偆偵憱傟偽僄儞僕儞偵傗偝偟偄偲偄偆偙偲偵側傝傑偡丅
| (rpm) | 奨拞憱峴梡 | 僗億乕僣憱峴梡 | 側傫偱傕俷俲梡 | 俴俤俢偺怓 |
| START | 600 | 500 | 600 | |
| STEP1 | 400 (600-3400) | 500 (500-4000) | 400 (600-3400) | 椢怓(崟抧) |
| SETP2 | 400 (3400-6200) | 400 (4000-6800) | 500 (3400-6900) | 墿怓(椢抧) |
| SETP3 | 200 (6200-7600) | 100 (6800-7500) | 100 (6900-7600) | 愒怓(墿抧) |
忋偺昞偼丄僶乕僌儔僼偺揰摂僷僞乕儞偱偡丅俽俿俙俼俿偼椢怓偺俴俤俢偑弶傔偰揰摂偡傞夞揮悢偱丄夞揮悢偑俽俿俤俹侾憹偊傞枅偵侾偮俴俤俢傕揰摂偟傑偡丅俈偮揰偄偨偲偙傠偱丄俽俿俤俹俀偵堏峴偟傑偡丅俽俿俤俹俀偱偼墿怓偺揰摂偵側傝丄俽俿俤俹俁偱偼愒怓偺揰摂偵側傝傑偡丅俽俿俤俹偺庡側堄枴偼丄俽俿俤俹侾偑奨忔傝丄俽俿俤俹俀偑僩儖僋僶儞僪丄俽俿俤俹俁偑儗僢僪僝乕儞傪帵偟傑偡丅
惢嶌曇 |

晹昳悢偑彮側偔偰嵪傓傛偆偵愝寁偟傑偟偨丅懍搙寁偲夞揮寁傪摨帪偵侾偮偺俹俬俠乮俠俹倀乯偱張棟偡傞偺偼丄僾儘僌儔儉揑偵偼彮乆栵夘偱偡丅侾屄係俆侽墌偟偐偟側偄俹俬俠偱偡偐傜丄俀屄巊偭偨曽偑娙扨偐傕偟傟傑偣傫偑丄偦偺曈偼庯枴偱侾偮偵偟傑偟偨丅戙傢傝偵丄俴俤俢僪儔僀僶傪巊梡偟側偐偭偨偺偱丄岝搙偑掅偔丄傑偨擖庤惈偐傜崅婸搙俴俤俢偱偦傠偊傜傟側偐偭偨偺偱丄擔拞偼彮偟尒擄偄傛偆偱偡丅
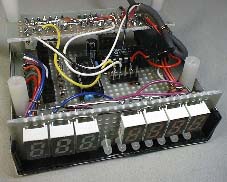
婎斅偼丄忋偺幨恀偺俠俹倀偺忔偭偨儊僀儞婎斅埲奜偵傕丄僷儖僗怣崋傪張棟偡傞偨傔偵74HC14偲74HC74偑忔偭偨婎斅丄俈僙僌儊儞僩俴俤俢側偳偑忔偭偨婎斅偺俁枃偐傜惉偭偰偄傑偡丅夞楬偼娙扨側偺偱偡偑丄攝慄偑栵夘側俴俤俢婎斅偲丄幵偺怣崋偲崌傢偣崬傫偱挷惍偑昁梫側僷儖僗怣崋張棟婎斅偺惢嶌乛挷惍偵偼庤娫偑偐偐傝傑偟偨丅偁偲丄僾儘僌儔儉傕嬅偭偨暘偩偗堄奜偵帪娫偑妡偐偭偰偄傑偡丅
働乕僗偵偼丄侽丏俆倣倣岤偺傾儖儈斅傪愜傝嬋偘偨偩偗偺暔偵丄儔僢僇乕偱怓傪揾偭偨偩偗偺娙扨側傕偺偱偡丅幵偺僟僢僔儏儃乕僪偵屌掕偟偰丄偁傑傝怗傜側偄偺偱嫮搙揑偵偼庛偔偰傕栤戣側偝偦偆偱偡丅俴俤俢偺慜偵偼摟柧側壓晘偒偵僂僀儞僪丒僼傿儖儉偺梋傝傪揬偭偨暔傪巊偭偰擣幆棪傪偁偘偰偄傑偡丅

僀僌僯僢僔儑儞丒僷儖僗偵偮偄偰 |
懍搙寁偼幵懍僷儖僗傪巊偄傑偡偑丄俵俼俀偺応崌丄夞揮寁偵偼僀僌僯僢僔儑儞丒僷儖僗乮俬俧乯傪巊偄傑偡丅幵懍僷儖僗偼僨僕僞儖揑側僷儖僗怣崋側偺偱丄埖偄偼娙扨側偺偱偡偑丄僀僌僯僢僔儑儞丒僷儖僗偼晄壜夝側偙偲偑懡偄僷儖僗偱偡丅傑偨丄俬俧僷儖僗偺堷偒弌偟偼俙俤亅侾偲偄偆僐僱僋僞傪巊偄傑偡丅偙傟偼丄俬俧僷儖僗偩偗偱側偔丄幵懍僷儖僗傕弌偰偄傞偺偱丄偙傟傪巊偊偽堦婥偵庢摼偡傞偙偲偑偱偒傑偡丅
幚嵺偵丄俬俧僷儖僗傪僆僔儘僗僐乕僾偱娤應偟偰傒傞偲丄侾夞揮偱係偮偺僷儖僗偑娤應偱偒傑偡丅偟偐偟丄僷儖僗偼丄俀偮偢偮楢懕偟偰敪惗偟偰偄傞傛偆偱偡丅棟孅偲偟偰偼丄僄儞僕儞偼奺婥摏偑俀夞揮偱侾搙揰壩偝傟傑偡偺偱丄侾夞揮偱俀偮偺僷儖僗偑敪惗偝傟傞偼偢側偺偱丄偙偺楢懕偟偨僷儖僗偼侾夞偺揰壩偱婲偒傞暃師揑側梫場偱敪惗偟偰偄傞傛偆偱偡丅
傑偨丄俬俧僷儖僗慄偺僀儞僺乕僟儞僗偼崅偄傛偆偱丄侾侽俲兌偺晧壸掞峈偱傕攇宍偑曄壔偟偰偒傑偡丅幚應偡傞偲俀俲兌掱搙側傛偆偱偡偑丄忬嫷偱暋嶨偵曄壔偟偰偄傞傛偆偱偡丅偍傑偗偵丄傾僀僪儕儞僌帪偼幐壩偟偰偄傞偺偐丄俬俧僷儖僗偺敪惗偑堦條偱偼側偔丄帪乆帟敳偗偵側偭偰偄傑偡丅偪側傒偵丄幐壩偼幵帺懱偺晄挷側偺偐丄巇條側偺偐丄僨傿乕儔乕偱傕尨場偼傢偐傜側偄傛偆偱偟偨(丱丱丟)
僆僔儘僗僐乕僾偱娤應偟偨寢壥偲丄悇應傪尦偵丄怓乆偲僷儖僗偺拪弌曽朄傪帋偟偰傒傑偟偨偑丄晄壜夝側僷儖僗攇宍偺偨傔丄側偐側偐忋庤偔偄偒傑偣傫丅僷儖僗偺庢傝弌偟偼丄幵懍僷儖僗偲摨條偵丄僟僀僆乕僪傪巊偭偰僷儖僗偑侽倁乮惓妋偵偼僾儖傾僢僾掞峈埲壓乯偵側偭偨帪偵専弌偱偒傞傛偆偵攝慄偟偨偺偱偡偑丄僾儖傾僢僾掞峈偺掞峈抣偑掅偄偲攇宍偑榗傫偱偟傑偆偟丄僷儖僗惈僲僀僘傪戝検偵娷傒傑偡偟丄俆倁偱僾儖傾僢僾偡傞偲丄攇宍偺搒崌偐晄壜夝側攇宍偑弌椡偝傟偰偟傑偭偨傝偲崲擄傪嬌傔傑偟偨丅
堦墳偺幚尡寢壥偐傜丄僐儞僷儗乕僞乮俴俵俁俁俋乯傪巊偄丄僴僀儗儀儖乮侾係倁乯傛傝俀倁掅偄侾俀倁傪巇愗傝抣偵偟偰僨僕僞儖壔偡傞偺偑嵟傕慺捈側攇宍偑娤應偱偒傑偟偨丅偟偐偟丄僾儖傾僢僾掞峈傪侾侽侽倠兌偲崅傔偵愝掕偟偰傕丄側偤偐昞帵偝傟傞夞揮悢偼侾乛俁傎偳彮側偔側偭偰偟傑偄傑偡丅嬼慠偱偡偑丄僾儖傾僢僾掞峈傪奜偟偨帪偵偼傾僀僪儕儞僌埲奜偱偺夞揮悢偑僺僞儕偲堦抳偟偨偺偱丄嵟廔揑偵偼僾儖傾僢僾掞峈柍偟偱夞楬偵慻傒崬傓偙偲偵偟傑偟偨丅僟僀僆乕僪偑偮偄偰偄傞偺偱丄僐儞僷儗乕僞偵偼揹埑偼棳傟側偄乮僐儞僷儗乕僞偺旝庛側楻傟揹棳偼棳傟傞偩傠偆偑乯僴僘側偺偵晄壜夝偱偡偑丄傑偁丄寢壥墲棃偲偄偆偙偲偱丄堦墳偺姰寢傪偟傑偟偨丅
偝偰丄偙偺傛偆側晄壜夝側尰徾偼丄俵俼俀偺傒側偺偐丄懠幵偱傕摨偠側偺偐丄帒椏偑慡偔柍偄偺偱晄柧偱偡丅埲慜丄僟僀僆乕僪僽儕僢僕傪偮偗偰丄惍棳偟偰儊乕僞乕傪怳傜偣傞榖傪壗張偐偱撉傒傑偟偨偑丄傕偲傕偲丄夞揮寁偼傾僫儘僌抣偵曄姺偟偰偐傜悢抣壔偡傞傕偺側偺偱偟傚偆偐丠偙傟偩偲丄偪傖傫偲峑惓偟側偄偲抣偑怣梡偱偒側偄偱偡偑丒丒丒
奐敪偵摉偭偰偺棤榖 |
PIC16F84偺撪晹儊儌儕偼俇俉僶僀僩偁傝傑偡丅慜偺宆偺PIC16C84偵偼俁俇僶僀僩偟偐偁傝傑偣傫丅偙偺僾儘僌儔儉偱偼儊儌儕傪俁俇僶僀僩埲忋巊偭偰偄傞偺偱丄PIC16F84偱側偄偲摦嶌偟傑偣傫丅偦傟傎偳偵丄寢峔暋嶨側僾儘僌儔儉偵側偭偰偄傑偡丅
俈僙僌儊儞僩俴俤俢偼丄偱偒傟偽丄悢寘傑偲傑偭偰傞僞僀僾偺曽偑埖偄堈偄偺偱偡偑丄俁乣係寘偲傕側傞偲丄婥偵擖偭偨偺偼彮側偄傛偆偱偡丅巇曽偑柍偄偺偱俈屄暲傋傞偙偲偵偟傑偟偨丅埨偐偭偨偺偼楅彜偺侾屄侾侽侽墌偱偟偨偑丄婓朷偺墿怓偼柍偔庨怓偵側偭偰偟傑偄傑偟偨丅偍傑偗偵丄椢怓偑俫俹偺崅婸搙偵斾傋丄庨怓偼儘乕儉偺埨暔偱偡丅摨偠揹棳傪棳偟偰傕丄椢偺曽偑柧傞偄偲偄偆媡揮尰徾偑婲偒偰偟傑偄傑偟偨丅彫宆僒僀僘偱傾僲乕僪僐儌儞偵尷掕偡傞偲丄側偐側偐慖傋傑偣傫丅
偍傑偗偵丄彫宆偺俈僙僌俴俤俢偼丄抂巕偑俀倣倣僺僢僠偵側偭偰偄傑偡丅偦偺傑傑偱偼儐僯僶乕僒儖婎斅偵偝偝傝傑偣傫丅巇曽偑柍偄偺偱丄僺儞傪曻幩忬偵峀偘偰柍棟栴棟墴偟崬傫偱敿揷晅偗偟傑偟偨丅彮偟婎斅偐傜晜偒傑偡偑丄俀怓俴俤俢偺崅偝偑崅偄偺偱丄挌搙奆摨偠崅偝偵偱偒傑偟偨丅
俈僙僌俴俤俢偑俈寘傕偁傞偲丄攝慄偼寢峔戝曄偱偡丅摿偵俴俤俢傪庢傝晅偗傞婎斅傪僊儕僊儕偺戝偒偝偵偟偨偺偱丄攝慄偼奆丄嬻拞攝慄偵側偭偰偟傑偄傑偟偨丅曐庣惈偼偲偭偰傕埆偦偆偱偡(丱丱丟)
俴俤俢傪僟僀僫儈僢僋丒僗僉儍儞偱柧傞偔揰偡偵偼丄戝栚偺揹棳傪棳偟偰傗傞傂偮傛偆偑偁傝傑偡丅僐儌儞懁偼丄嵟戝俈屄偺俴俤俢傪揰摂偝偣傞偺偱丄嵟掅偱傕悢侾侽倣俙偼昁梫偱偡偑丄斀懳懁偼侾偮偺俴俤俢傪僪儔僀僽偡傞偩偗偺晧壸偵側傝傑偡丅偦偙偱丄俠俹倀乮俹俬俠乯偵僪儔僀僶傪奜晅偗偣偢偵巊偆偙偲偵偟傑偟偨丅偙傟偱傕僗儁僢僋忋偼俀侽倣俙偼棳偣傑偡丅僐儌儞懁偼侾俆侽倣俙傑偱棳偣傞俀俽俙侾侽侾俆傪巊偄傑偟偨偺偱丄揹棳惂尷掞峈偵偼俀俀侽兌傪巊偄侾僙儖偁偨傝侾侽悢倣俙棳偣傞傛偆偵愝寁偟傑偟偨偑丄幚嵺偵偼俋倣俙掱偟偐棳傟傑偣傫丅偝傜偵丄庨怓偺俴俤俢偑嵟戝掕奿侾俆倣俙側偺偱丄偙傟埲忋棳偡偺傕婋尟側偺偱丄偙傟偱懨嫤偡傞偙偲偵偟傑偟偨丅偟偐偟丄擔拞巊偆偵偼岝搙晄懌偐傕偟傟傑偣傫丅
幵偺僄儞僕儞夞揮悢偼侾暘娫偵壗夞夞偭偨偐偱偁傜傢偟傑偡丅俉侽侽rpm偩偲丄侾昩娫偵偼侾俁夞梋傝偟偐夞傜側偄傢偗偱偡丅偦傟偵丄侾昩枅偵昞帵偟偰偄偨偺偱抶偡偓傑偡丅偦偙偱丄300mS枅偵寁應偟偰昞帵偝偣傞偲丄椺偊偽4800rpm側傜係俉夞僇僂儞僩偝傟傑偡丅偙傟偩偲丄僾儘僌儔儉傕娙扨偱偡偟堦愇擇捁偱偡丅偟偐偟丄100rpm扨埵偱偟偐昞帵偱偒側偄偺偼彮偟偝傒偟偄偒傕偟傑偡丅
懍搙寁偼丄幵懍僷儖僗偺僷儖僗娫偺帪娫傪寁應偟傑偡丅幵懍僷儖僗偼392.5mm堏摦偡傞偨傃偵侾僷儖僗敪惗偟傑偡偑丄帪懍偑抶偔側傞偲僷儖僗娫偺帪娫偑柍尷戝偵側傞応崌傕峫偊傜傟傑偡丅偙偺曈偼丄揔搙側儕儈僢僞傪晅偗偰偍偔昁梫偑偁傝傑偡丅傑偨丄懍搙偑抶偔側傞偵偟偨偑偭偰僇僂儞僞偺悢抣偑憹偊傞偲偄偆媡悢偵側傞偺偱丄寁嶼偵偼妱傝嶼偑昁梫偱偡丅俹俬俠偱妱傝嶼傪偡傞偺偼彮乆傗偭偐偄偱偡偺偱丄尰嵼偼堷偒嶼傪儖乕僾偱峴偭偰寁嶼偟偰偄傑偡丅
![]()