![]() デバイス設定
デバイス設定
プロセッサーエキスパート(PE)を使って設定します。
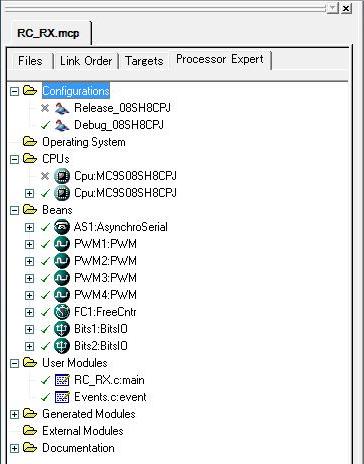
下図のBeansフォルダがPEで設定した結果です。プロジェクト名はRC_TXです。
・AS1:シリアル通信設定(UART)
・PWM1:PWM1出力設定
・PWM2:PWM2出力設定
・PWM3:PWM3出力設定
・PWM4:PWM4出力設定
・FD1:8ビットモジュロカウンタ設定
・Bits1:ポート入力設定(4ビット)
・Bits1:ポート入力設定(2ビット)
CodeWarriorで作成したプロジェクトフォルダをダウンロードできます。CODEフォルダに全てのソースがあります。
RC_RX.lzh へのリンク←クリックしてダウンロードしてください。
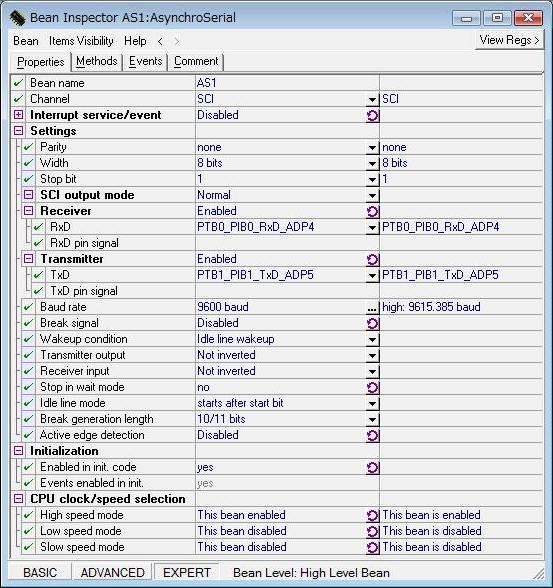
【シリアル通信設定】AsynchroSerial
Beans SerectorのPoart IOフォルダの![]() をダブルクリックして設定します。Baud rateを9600に設定します。誤差は0.16%なので通信に支障はありません。Transmitterは使用しませんが将来の事も考慮して、Enabledに設定しています。Parityなし、Widthは8ビット、Stop
bitは1ビットです。
をダブルクリックして設定します。Baud rateを9600に設定します。誤差は0.16%なので通信に支障はありません。Transmitterは使用しませんが将来の事も考慮して、Enabledに設定しています。Parityなし、Widthは8ビット、Stop
bitは1ビットです。
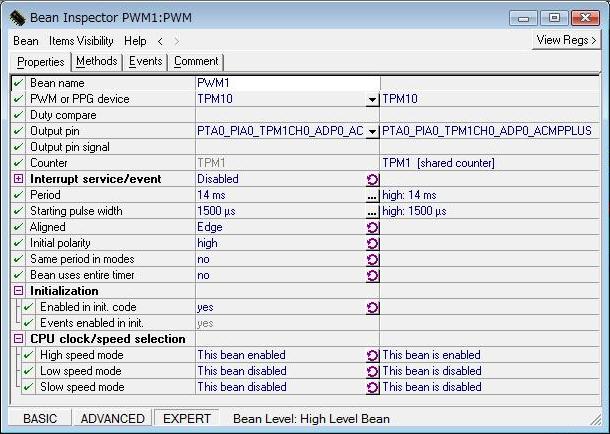
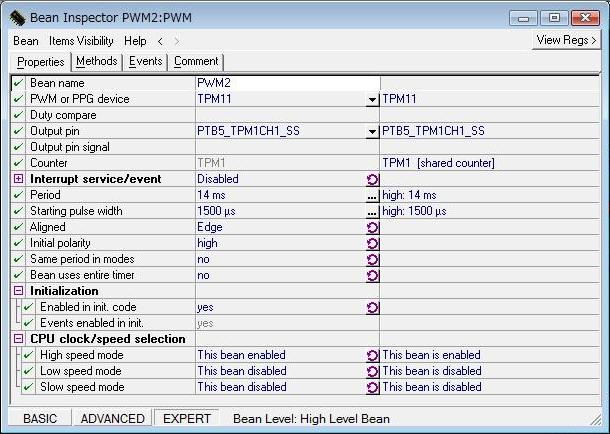
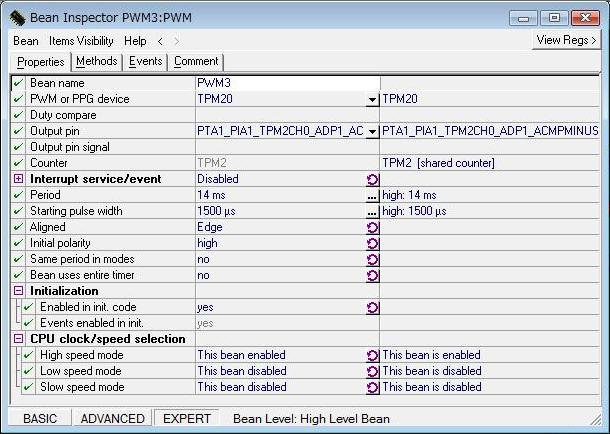
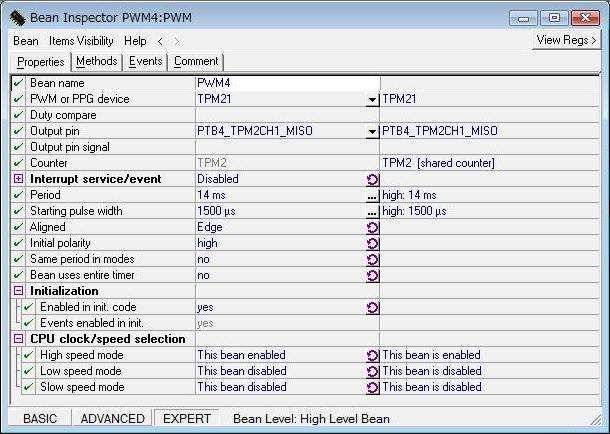
【PWM1】PWM
Beans SerectorのPoart IOフォルダの![]() をダブルクリックして設定します。PWM出力はTPM10、TPM11、TPM20、TPM21の4つのポートから出力できます。それぞれのPeriodを14mS、Starting
pulse widthを1500μS、Initial polarityはhighに設定するとラジコンのサーボを制御する事が出来ます。Output
pinは複数あり選択できる物もあります。
をダブルクリックして設定します。PWM出力はTPM10、TPM11、TPM20、TPM21の4つのポートから出力できます。それぞれのPeriodを14mS、Starting
pulse widthを1500μS、Initial polarityはhighに設定するとラジコンのサーボを制御する事が出来ます。Output
pinは複数あり選択できる物もあります。
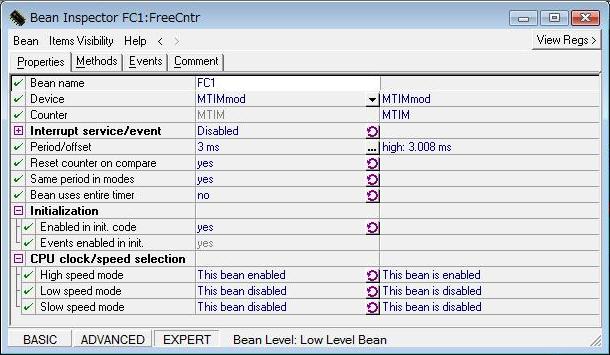
【モジュロカウンタ設定】FreeCntr
Beans SerectorのPoart IOフォルダの![]() をダブルクリックして設定します。Period/offsetで周期を3mSに設定します。
をダブルクリックして設定します。Period/offsetで周期を3mSに設定します。
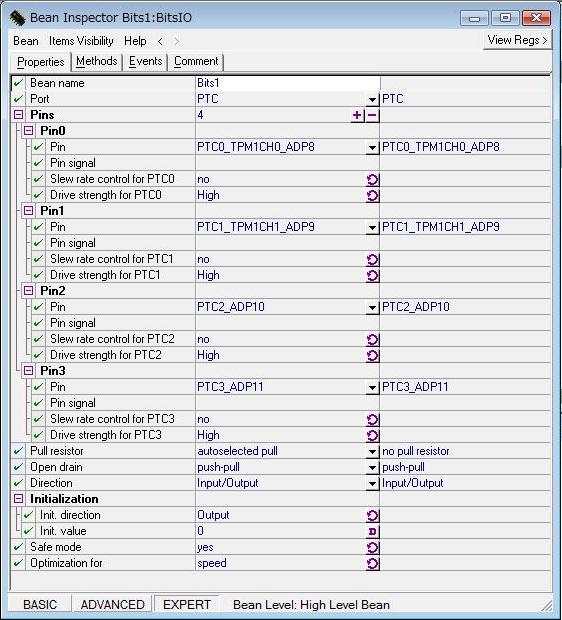
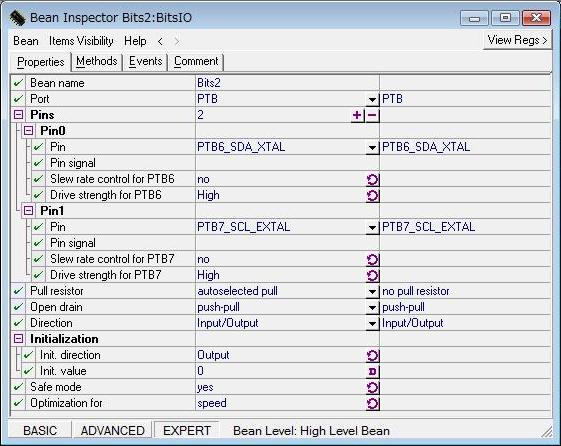
【出力ポート設定】BitsIO
Beans SerectorのPoart IOフォルダの![]() をダブルクリックして設定します。Port Cで4ビット、PortBで2ビットを設定します。
をダブルクリックして設定します。Port Cで4ビット、PortBで2ビットを設定します。
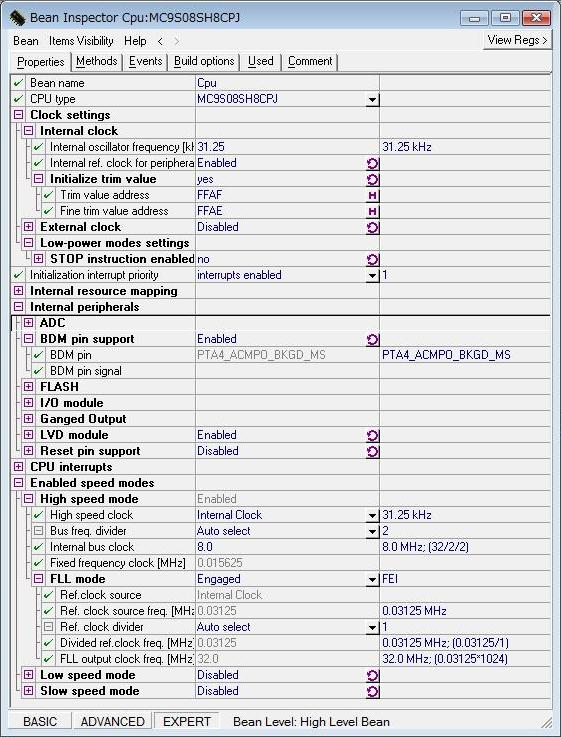
【CPU設定】MC9S08SH8CPJ
CPUの設定は特に変更していません。バスクロックは8MHzです。MethodsでDelay100USをダブルクリックしてチェックを入れてください。全ての設定が終わったら左上のコマンドProsessor
ExpertのGenerate Code’RC_RX.mcp’をクリックしてコードを生成します。