無線 LAN PC カードをマイコンに接続して、改めて Bluetooth の魅力に引き込まれました。数十mA という Bluetooth モジュールの消費電力の低さは電池駆動でも安心ですし、モジュールと CPU との間の I/F は USB か UART となっているため、UART 接続なら非常に簡単にマイコンから制御が可能です。これで PCMCIA I/F の半田付け 68本ノックともオサラバ出来ます。
Bluetooth に関しては、これまでもトラ技や Interface 誌にて幾度か紹介されています。周波数ホッピングとかスペクトル拡散とか Bluetooth パケットのフォーマット等の情報が書かれています。しかしこれらの情報は Bluetooth モジュールを作る人には重要なのかもしれませんが、モジュールをマイコンとつなげて使いたい自分には余り役に立たない情報でした。モジュールとどんなやり取りをすれば無線通信が出来るようになるのか、雑誌の記事を読んでも全然分からない、そんな状態が続いていました。
 そんなモンモンとしている時にめぐり合ったのが京セラ H" 端末用 Bluetooth モデム BL-PC10 の 1,980円投売り通販でした。このモデムユニットは Ericsson の Bluetooth モジュールが使われていることがパッケージに記載されており、以前から目をつけておりました。Ericsson のモジュールは UART I/F を持っており、マイコンや PC との接続も容易です。あまりの安さに、迷わず大量購入をしてしまいました。
そんなモンモンとしている時にめぐり合ったのが京セラ H" 端末用 Bluetooth モデム BL-PC10 の 1,980円投売り通販でした。このモデムユニットは Ericsson の Bluetooth モジュールが使われていることがパッケージに記載されており、以前から目をつけておりました。Ericsson のモジュールは UART I/F を持っており、マイコンや PC との接続も容易です。あまりの安さに、迷わず大量購入をしてしまいました。
早速モデムユニットと PC カードを分解し、Ericsson Bluetooth モジュールを取り外しました。モジュールのピン配置は Ericsson の Web ページからデータシートを落として知ることが出来ます。現在は ROK 101 008 ではなく 007 の方しか落とせないようですが、ピン配は同一でした。BGA パッケージなのでハンダ付けに若干難儀しますが、接続するピン数も少ないので、細いポリウレタン線を使って引っ張り出しています。
 モジュールの VCC / VCC_IO / ON の3つの端子に 3.3V を供給し、TxD / RxD を PC やマイコンと接続するだけで、このモジュールを制御することが出来るようになります。このままでは数 cm しか電波が飛ばないので、誘電体アンテナをモジュールと同じくモデムユニットや PC カードから取り外し、ANT と GND の2端子を接続します。
モジュールの VCC / VCC_IO / ON の3つの端子に 3.3V を供給し、TxD / RxD を PC やマイコンと接続するだけで、このモジュールを制御することが出来るようになります。このままでは数 cm しか電波が飛ばないので、誘電体アンテナをモジュールと同じくモデムユニットや PC カードから取り外し、ANT と GND の2端子を接続します。
また分解してモジュールを取り外さなくても、BL-PC10 に付属する PC カードを使って Bluetooth モジュールの制御が可能です。BL-PC10 のドライバをインストールするとシリアルポートとモデムが追加されますが、このシリアルポートの方が、上記モジュールの TxD / RxD とそのまま繋がっています。inf ファイルを修正してモデムがインストールされないようにすると良いかもしれません。難点は Win9x ドライバしか用意されていない点でしょうか。
HCI なんて怖くない
さてこれで準備が整いました。肝心なのはモジュールをどう制御するのか、です。まず重要なのは仕様書です。Bluetooth 公式サイトの仕様書ページから v.1.1 CORE 仕様書を落とします。あとはこれをどう読みこなすか、です。英文だということもさることながら、必要な情報が分散しているので読むコツを掴むまでは時間がかかってしまいました。
Bluetooth では HCI というインタフェースの名前をよく聞きます。これが PC やマイコンで Bluetooth モジュールを制御したり、データを無線で送受信するための一番最下層のインタフェースになります。この HCI では Command Packet, Event Packet, ACL/SCO Packet という3種類のパケットが定義されており、ここを理解するのが最初の山でした。
 右図のように、モジュールに対する指示が Command Packet です。モジュールはこのパケットを渡されると、コマンドの内容に応じて Event を返したり、無線で他のモジュールをやり取りをしたりします。他のモジュールと送受信するデータそのものは Data Packet によってやり取りします。また、無線によって他のモジュールから指示があった時には Event Packet がモジュールから通知されます。
右図のように、モジュールに対する指示が Command Packet です。モジュールはこのパケットを渡されると、コマンドの内容に応じて Event を返したり、無線で他のモジュールをやり取りをしたりします。他のモジュールと送受信するデータそのものは Data Packet によってやり取りします。また、無線によって他のモジュールから指示があった時には Event Packet がモジュールから通知されます。
これら3種類のパケットのフォーマットは CORE 仕様書の PartH:1 4.4 EXCHANGE OF HCI-SPECIFIC INFORMATION に書かれています。が、UART を通じてやり取りされるパケットの先頭には PartH:4 2 PROTOCOL の Table 2.1 に書かれている indicator が付加されます。ということで Command Packet をモジュールに送る時にはまず 0x01 を UART で送り、続いて 16bit の Opcode を送るということになります。またモジュールから UART を介してパケットを受信した時には、先頭が 0x04 なら Event Packet と、0x02/0x03 なら Data Packet だと解釈をします。
さて次は Data Packet で他のモジュールとデータのやり取りをするまでの手順です。Bluetooth モジュールは内部に state を持っており、決まった手順を踏まないと相手が見えない、相手から自分が見えない、となってしまいます。ザックリ書くと、(1)他のモジュールから見えるように Write Scan Enable Command でモジュールを設定する、(2)他のモジュールから接続要求があると Connection Request Event がモジュールから渡されるので、Accept Conenction Request Command をモジュールに伝える、(3)接続が完了すると Connection Complete Event がモジュールから渡される、です。これで相手のモジュールとの接続が完了し、これ以降は相手のモジュールと自由に Data Packet のやり取りが出来ます。
あとは Command をモジュールに送ると Command Complete Event や Command Status Event が返って来るのでそれを処理したり、Reset したりモジュール名を設定したりコマゴマとしたことを行なえば良いでしょう。実際には Data Packet を使って、HCI より上位の L2CAP とか SDP とか RFCOMM といったプロトコルに応じたやり取りをする必要があるのですが、とりあえずはこの辺でモジュール間でのやり取りをさせてみることにします。
イカサマ無線移動カメラをデッチ上げる
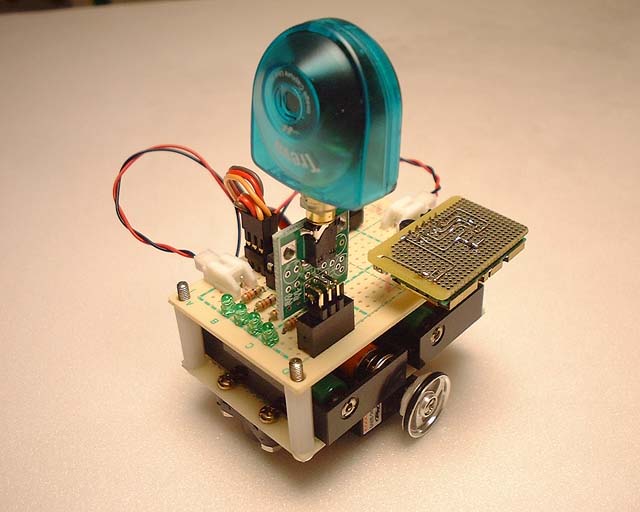
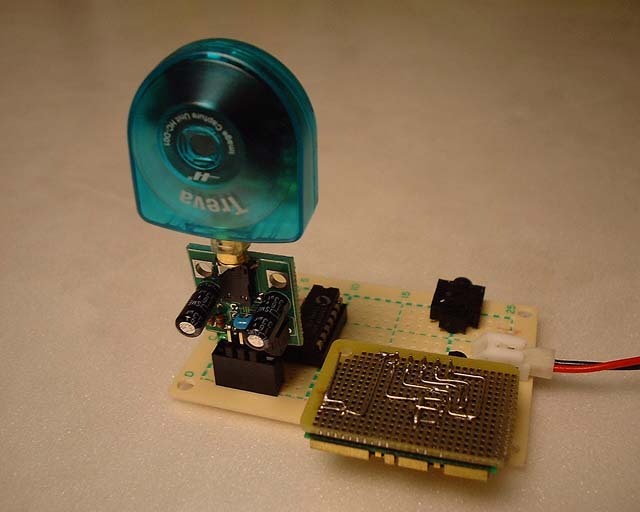 おなじみ C8051F300 に Treva と Ericsson Bluetooth モジュールをつなげます。そして L2CAP の一部まで実装したプロトコルスタックを上記仕様書を見ながら作成しました。このプロトコルスタックを blueme と名付けてみました。最初は PC 用と共用で作っていたのですが、力弱く途中から見事に分岐してしまいました。
おなじみ C8051F300 に Treva と Ericsson Bluetooth モジュールをつなげます。そして L2CAP の一部まで実装したプロトコルスタックを上記仕様書を見ながら作成しました。このプロトコルスタックを blueme と名付けてみました。最初は PC 用と共用で作っていたのですが、力弱く途中から見事に分岐してしまいました。
C8051F300 はご存知の通り RAM が 256 バイトしか搭載しておりませんので、パケットの処理には難儀します。とりあえず UART 受信用に 32 バイトのバッファを用意し、プロトコルスタックの方ではバッファから1バイトずつ読んでは処理をするという形を取ることにしました。処理コードは冗長な部分がありますが、必要とあればパケット処理を幾らでも続けることが出来ます。
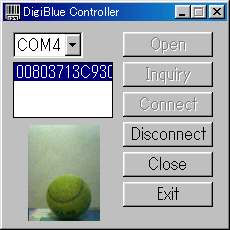 PC 側のアプリも VC++ にて作成しました。COM ポートの先に Ericsson モジュールが見えれば OK です。Open ボタンで選択した COM ポートをオープンし、Inquiry ボタンで他のモジュールを探します。他のモジュールが見つかったらモジュール固有のアドレスが表示されるので選択し、Connect ボタンを押すと接続します。
PC 側のアプリも VC++ にて作成しました。COM ポートの先に Ericsson モジュールが見えれば OK です。Open ボタンで選択した COM ポートをオープンし、Inquiry ボタンで他のモジュールを探します。他のモジュールが見つかったらモジュール固有のアドレスが表示されるので選択し、Connect ボタンを押すと接続します。
接続状態のときにスペースバーを押すと、Treva 画像転送開始コマンドが Bluetooth モジュールを介して C8051F300 に送られます。そして C8051F300 は Treva 画像を取得しながら Bluetooth モジュールを介して画像データを PC に送ります。1画面分の画像データが送られたら PC 側に画像が表示されます。Bluetooth とは呼べないイカサマなやり方ですが、とりあえず無線カメラの完成です。
調子に乗って C8051F300 に移動用の RC サーボを付けてみました。先程の PC アプリでカーソルキーを使って台車を動かせます。これでイカサマ無線移動カメラの完成です。処理がイカサマかつヤッツケなので、パケットをロストすると暴走してしまうシロモノですが、とりあえずカーソルキーで好きな所に移動させて、その場所の映像を PC に転送出来ます。それだけで、結構遊べます。楽しいです。
 こんな感じで、アマチュアでもモジュールさえ入手出来れば、Bluetooth ゴッコで遊べるようになりました。Treva による画像遊びも楽しいですが、無線遊びも楽しいです。現状ではマイコン側 PC 側両方とも自作のアプリを使わないといけないのですが、Bluetooth のメリットは PC 側の環境が整っていることだと思うので、やはり L2CAP から上のプロトコルを真面目に実装しないとイカンなあと考えています。
こんな感じで、アマチュアでもモジュールさえ入手出来れば、Bluetooth ゴッコで遊べるようになりました。Treva による画像遊びも楽しいですが、無線遊びも楽しいです。現状ではマイコン側 PC 側両方とも自作のアプリを使わないといけないのですが、Bluetooth のメリットは PC 側の環境が整っていることだと思うので、やはり L2CAP から上のプロトコルを真面目に実装しないとイカンなあと考えています。
-
C8051F300 用 bluetooth モジュール制御アプリケーション (14KByte LZH 圧縮)
-
PC 用 bluetooth モジュール制御アプリケーション (1.2MByte LZH 圧縮)
