 c.mos さんの Web ページで LEGO 作品を動画で見る楽しさを知り、すっかりビデオキャプチャの虜になってしまった。勢いでさくっとキャプチャカードを購入し、早速 LEGO の動いている所を撮ることにした。
c.mos さんの Web ページで LEGO 作品を動画で見る楽しさを知り、すっかりビデオキャプチャの虜になってしまった。勢いでさくっとキャプチャカードを購入し、早速 LEGO の動いている所を撮ることにした。
「シンプルイズベスト」これだ。今のいしかわに欠けているのは。初心に返って4足の足の動きを考え直す。Joe さんの4足ロボットを参考にロッドで足を作ってみる。
 またまた邪念が!ロボット学会本を見ると、スライド部分を有するモノがある!早速マネして作ってみたが、上下のギアをどうやって同期させるかが難問となった。同じ径のギアを使用すれば簡単なのだが、そうなると前後の足の長さが変わってしまう。ロッドもそんなに長いモノは無い。
またまた邪念が!ロボット学会本を見ると、スライド部分を有するモノがある!早速マネして作ってみたが、上下のギアをどうやって同期させるかが難問となった。同じ径のギアを使用すれば簡単なのだが、そうなると前後の足の長さが変わってしまう。ロッドもそんなに長いモノは無い。
再び失敗作か?という不安がよぎり、肩の力が抜けた。そうか!べつに下も回転させる必要無いんじゃないか!上のギアによる回転運動が足先にも伝わればいいんだ!
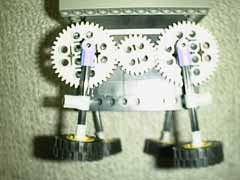 と開き直り、右のようなシンプルな構造になった。足先も上のギアの回転運動と同じ動きをする。真ん中の支点はロッドが上下できるようになっているため、動きを押さえる事はない。ギアの駆動も真ん中に小さいギアを挟めばよいので簡単だ。
と開き直り、右のようなシンプルな構造になった。足先も上のギアの回転運動と同じ動きをする。真ん中の支点はロッドが上下できるようになっているため、動きを押さえる事はない。ギアの駆動も真ん中に小さいギアを挟めばよいので簡単だ。
大きなギアを使用してしまったため、重心が高くなってしまったのは失敗だったが、それなりにまとまったような気がする。早速動かして動画やろうぜ!
 動画をみると分かるが、最初はおとなしく歩くが暫くすると大きく揺れはじめる。振動がどんどん大きくなっていくようだ。やはり足先の軌跡は円形だとツライ。あと重心の高さも気になる。トレッドを広くして重心を低くしてみたらどうだろう?次回のお楽しみだ。
動画をみると分かるが、最初はおとなしく歩くが暫くすると大きく揺れはじめる。振動がどんどん大きくなっていくようだ。やはり足先の軌跡は円形だとツライ。あと重心の高さも気になる。トレッドを広くして重心を低くしてみたらどうだろう?次回のお楽しみだ。
それにしても動画はリソースイータだ。高速SCSI HDD が欲しい。それとファイルフォーマットだ。色々作って試したが決定打はなかった。とりあえず Indeo 圧縮でファイルサイズ優先にした。見られない人は連絡して頂けると嬉しい。