 週末になって久しぶりに MindStorms と戯れる事が出来た。今2足歩行がアツいようだが、相変わらず4足歩行で攻めてみる。前回失敗した擬似チェビシェフリンク機構を懲りずに使ってみる。
週末になって久しぶりに MindStorms と戯れる事が出来た。今2足歩行がアツいようだが、相変わらず4足歩行で攻めてみる。前回失敗した擬似チェビシェフリンク機構を懲りずに使ってみる。
どーがくんで使用したロッド足と擬似チェビシェフリンク機構を組み合わせる。どーがくんはギアの回転をそのままロッドに伝えたが、楕円運動をロッドに伝えればマイルドに歩くことが出来るのでは?リンクを上向きに配置してロッドと連携させた。なかなか良いぞ。
 今度は駆動伝達部だ。ちぇび夫くんの時はモータ位置に苦慮した。ミッドシップ配置を死守だ!ギアの段差をビームの延長補強用ビームで兼用し、強度の確保と無駄な長さの削減を両立できた。
今度は駆動伝達部だ。ちぇび夫くんの時はモータ位置に苦慮した。ミッドシップ配置を死守だ!ギアの段差をビームの延長補強用ビームで兼用し、強度の確保と無駄な長さの削減を両立できた。
まずは必要最小限のビームで作成。なかなかシンプルで良いぞ。モータもミッドシップに配置できた。ドライブシャフトを下に配置する事でモータの高さを低く抑えられた。幅も最小にする事でこれまた無駄なビームを駆逐。いしかわ的には無駄を省いたが、ホントはもっと根本的に無駄を省く発想が必要なのだろう。
 歩行中に分解しないように補強を入念に行い、足を取り付ける。カタチもなかなか良い。バッタとかの昆虫に近い。モータからの回転をあまり落とすことが出来なかった。モータへのトルク指示値を少なくして対応しよう。
歩行中に分解しないように補強を入念に行い、足を取り付ける。カタチもなかなか良い。バッタとかの昆虫に近い。モータからの回転をあまり落とすことが出来なかった。モータへのトルク指示値を少なくして対応しよう。
RCX はどうする?幅を縮めたので足が邪魔になり RCX を低く配置する事が出来ない。モータの上にブロックを積み上げて適当に載せる事にしよう。モータの位置が中央からずれてしまっていたが、色々積み上げたらバランスの悪さも改善された。
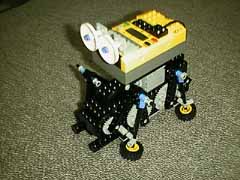 とりあえず歩かせてみた。空回転時には結構早く動くが、地面に置くとかなり遅くなる。やはりモータは最大トルクで動作させる方が良いようだ。モータと足の動きは慌ただしいが、進む速度はかなり遅い。しかし今まで作った4足歩行ロボットに比べて安定して歩いている。歩行装置のメリットである不整地走行性能は皆無だが....
とりあえず歩かせてみた。空回転時には結構早く動くが、地面に置くとかなり遅くなる。やはりモータは最大トルクで動作させる方が良いようだ。モータと足の動きは慌ただしいが、進む速度はかなり遅い。しかし今まで作った4足歩行ロボットに比べて安定して歩いている。歩行装置のメリットである不整地走行性能は皆無だが....
動画はスロー再生ではない。モータ速度最大でもホントにあの遅さなのだ。久しぶりの MindStorms は楽しい。時間がもっと欲しい。