|
 |
|
こさんくん1号機 ハードウェア基本情報 |
|
|
|
バッテリ電圧 |
12V |
|
サーボモータ数 |
24 (PWM)
(割り当て情報) |
|
DCモータ (送風用) |
2 |
|
重量 |
? |
|
全長 |
直立時 80cm |
|
コントロールボード |
RCB-3HV |
|
端子 |
USBポート 2ポート |
|
|
|
こさんくん2号機 ハードウェア基本情報 |
|
|
|
バッテリ電圧 |
12V |
|
サーボモータ数 |
24 (シリアル) (割り当て情報) |
|
DCモータ (送風用) |
1 |
|
重量 |
? |
|
全長 |
直立時 80cm |
|
コントロールボード |
RCB-4HV |
|
端子 |
|
|
|
|
|
|
|
|
|
|
|
筐体
〜 切削とアルマイト |
|
頭部はアクリル、ボディを構成するフレームはアルミです。基本的に、自分で切削したオリジナル品ですが、一部、外注して切削してもらったパーツも混じっています。
ボディでは、アルミの上に樹脂やアクリルで制作した外装を付けています。 |
|
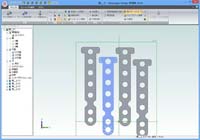 |
CADソフトでパーツの図面を作成します。(こさんくん1号機図面)
見通せる形であれば立体的なパーツを作成することも可能ですが、通常の切削では、平面図を作成します。
重量が大きくなると、ロボットの動きが悪くなるため、できるだけ軽量化をはかります。たとえば、ある程度の強度がたもてるように工夫して、円形の中抜きなどをします。
CADデータの制作とCNCによるアルミ切削のページで詳しく説明しています。 |
|
 |
CADで設計したパーツをCNCという切削機にかけます。左はBLACK IIというCNCです。ネジ穴まで正確な位置にあけることができます。
アルミ板はホームセンターでも売っていますが、強度が弱いので、ロボットパーツの専門店から購入することをお勧めします。
ドリルでアルミを切削し、パーツを切り出します。小さいパーツでも切削には数時間かかります。
CNCを持っていない場合は、ホビー・ロボットのパーツなどを販売している店で、アルミ切削サービスを行っていることろがありますので、その
ようなところに発注します。DXF形式などのCADのデータを送ると、アルミを切削して送り返してくれます。
CNCを購入する場合は、どれくらいの大きさまで切削できるかがポイントになります。たとえば、最大の切削面が20cm×15cmの場合、制作できる最大のパーツのサイズもこの大きさになります。
CADデータの制作とCNCによるアルミ切削のページで詳しく説明しています。 |
|
 |
むき出しのアルミでは味気ないので、スカスカになっている部分に、アクリルや樹脂で制作した外装をとりつけます。3Dソフトでデザインしたパーツを3Dプリンターで制作します。3DプリンターではCNCと異なり、見通せないような複雑な立体でも作成することが可能です。
CNCと同様、3Dプリンターを購入する場合は、どのくらいの大きさまで制作できるかがポイントです。左はダビンチという低価格の3Dプリンターです。 |
|
 |
切削したアルミは金属そのままの色です。味気ないので、アルマイトと呼ばれる色付けの処理をします。通常の塗料で塗装することもできますが、すこしたつとハゲてきます。アルマイトは化学的な処理を行うので、素材のものに色がつくような感じです。
アルマイトは通常の塗装と異なり、選べる色に制限があります。特に注意すべきは白色です。白色のアルマイトは染料がないためできません。業者に「白色」や「ホワイト」と言って発注すると、透明にアルマイトされたものが返ってきます。右のロボットは緑やオレンジにアルマイトしたパーツを使用しています。アルマイトしたあとも金属的な質感が残るのが普通です。
アルマイトを自宅でするためのキットが販売されていますが、業者に発注することもできます。ネットでアルマイトをしてくれる業者で点数が少なくてもを受け付けてくれるところを探すことができます。 |
|
|
|
| |
| 組み立て |
|
切削したアルミやアクリルを組み合わせてロボットを組み立てます。 |
|
 |
アルミパーツを必要に応じて曲げます。90度に曲げる場合がほとんどです。
アルミを曲げるための機械は非常に原始的です。アルミ板を機械にはさんで、えいっと曲げる感じです。 |
|
 |
小さなパーツを曲げるための工具もあります。ポケットベンダーという製品です。
写真から想像がつくと思いますが、2つの工具でパーツを挟んで、人力で曲げます。 |
|
|
各パーツはネジでとめていきます。バトル大会などに登場するホビー・ロボットでは、多くの場合M2と呼ばれネジが使用されます。サーボモータまわりのネジもこのサイズのものが多いです。
強度がないとネジが折れてしまうことがあるので、なるべく強度のあるものを選びます。 |
|
|
|
| |
| コントローラ
(コントロールボード) |
こさんくんのサーボモータは基本的に、近藤科学製です。
コントローラには、シリアル式とPWM式の2種類があります。こさんくん1号機はPWM式、2号機はシリアル式です。 |
|
 |
PWMはパソコンのFANコントロールにも使用されている形式です。たぶん、信号線から出力される信号の周波数によって動作を決めるのだと思います。
PWM式の場合は、サーボモータごとにコントローラと結線しなければなりません。
配線がごちゃごちゃするという欠点があります。
左は「こさんくん1号機」のコントローラ周辺です。
24本のサーボがあり、ケーブルが多くなるので、チューブでまとめています。
|
|
 |
シリアル式の場合はサーボモータを数珠つなぎにできます。
左は「こさんくん2号機」のコントローラ周辺です。
コントローラから頭、右手、左手、右足、左足のそれぞれにむけて1本づつのケーブルが出ているだけなので、配線がすっきりします。 |
|
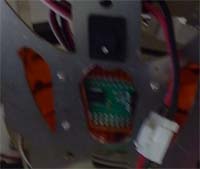 |
緑のところがコントローラの背面です。金属に触れたり、水にぬれたりすると大変なことになります。 |
|
|
|
| |
| アクチュエータ |
こさんくんのサーボモータは基本的に、近藤科学製です。
通常のモータ(DCモータといいます)と異なり、サーボモータは指定した角度で回転を停止させることができます。DCモータは、電源を供給してやると、回りつづけます。サーボモータは信号線で指定した角度で停止し、外部から力を加えても、その角度にとどまろうとします。
コントローラど同様、サーボモータには、シリアル式とPWM式の2種類があります。こさんくん1号機はPWM式、2号機はシリアル式です。 |
|
 |
PWM式のサーボモータには、4024、4013、4014などがあります。(これらの製品は同じサイズで作ら得ているので、後で楽に互いに差し替えることができます。)
どのサーボモータを使用するかのポイントは、トルクです。トルクが弱いと立ち上がったりの動作が困難になります。
4024は安価ですがトルクが弱く、内部の歯車も樹脂製のため、すぐに割れてしまいます。
4014はトルクが高いです。4013はトルクが少し落ちますが、その分、スピードが速くなっています。
こさんくん1号機は、4014と4013の組み合わせで使用しています。 |
|
 |
シリアル形式のサーボモータには、4031、4032、4033、4034などがあります。
4031は安価でトルクが弱いです。4034はトルクが高く、4033、4032はトルクを落としてスピードが速くなっています。
こさんくん2号機は、4032、4033、4034の組み合わせでできています。 |
|
|
|
| |
| 電源 |
|
|
|
 |
一般に流通しているパーツの電圧には5V、7V、12Vなどがあります。
5Vは、USBの電圧です。7Vはラジコンなどで使用される電圧です。12Vは車のバッテリーの電圧です。シガーソケットなども12Vです。パソコンの内部電圧も12Vなので、ハードディスクやFANなどのパーツは12Vで動くものが多いです。
サーボモータやコントローラは7Vか12Vのものが流通しています。
こさんくん1号機、2号機とも電源は12Vです。
12Vにしておくと、LEDなど車用のアクセサリーとして販売されているパーツやパソコンのパーツがそのまま流用できるので便利です。
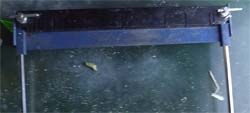
左の青いパックがバッテリーです。 |
|
|
バッテリーの状態が分かるようにロボットの前面に、ボルトを表示するLEDカウンターを装備しています。だいたい11V〜12Vの間の値が表示されています。電圧が低いと動作しないはずなのですが、バッテリーによっては、8Vくらいの低い値でも、必要なパワーが供給できるらしく、ちゃんと動作するものもあります。(電圧が11Vをきると、動かなくなるという単純なものではない
ようです。そうなる場合もあるし、ならない場合もあります。) |
|
|
ロボット用のバッテリーとして使用されているものにはニッカドやリポ(リチュームポリマー)などがあります。
ミリアンペアで容量が示されています。最低でも800mAぐらいは欲しいものです。それでも5分程度しか駆動できません。
(使い方によります。)私は最大で2500mAのものをもっていますが、1万円以上したと思います。充電には、リポ用の充電器が必要です。たいていバランサーという機能がついていて、+−以外に、バランサー用の端子がついています。
リチュームポリマーは扱いに注意が必要です。 |
|
 |
100V電源が使用できる場合は、安定化電源というものを使用して12Vに変換して電源に使用できます。
パソコンのパワーユニットも12Vなので使用できるはずですが、試したことはありません。
左は安定化電源です。
安定化電源を使用していると、リモコンが効かなくなることがあります。おそらく、サーボーモータ―を一度に動かすときにノイズが入っているのだと思います。安定化電源には、ノイズ対応のつまみがあり、これを調整するとトラブルが減るような気がしますが、定かではありません。ロボット用のバッテリーではリモコンのトラブルは発生しません。
このリモコンのトラブルは、後述のバッテリーの瞬発力と関係しているようにも思いますが、定かではありません。 |
|
 |
車用のバッテリーは、安いやつは、アマゾンで2500円くらいで買えます。
中に液体がはいっているタイプで、車用のバッテリーは12V、単車用のバッテリーは6Vです。購入すると箱にはバッテリーしか入っていないので、取り付け用の端子をホームセンターで購入します。500円くらいです。(端子はなくても結線できるとは思いますが。。。)
桁違いに容量が大きいので、電源が無い屋外のイベントなどで使用できます。
車で使用する場合と異なり、使用後は、充電しなければならないので、車のバッテリー用の充電器が必要になります。
車用のバッテリーは、型番からサイズが分かるのですが、容量(アンペア)は分からないようになっています。ネットで型番から、容量を調べることができます。 |
|
|
電池の性能は、ボルト数とアンペア数でだいたい決まりますが、それ以外に、瞬発力みたいな性能があります。経験上、瞬発力が低いと、ロボットのスイッチを入れた時(サーボが一斉に動くとき?)に、パワーが足りずにリセットがかかり、そのあと上手く動かないことがあるように思います。ロボット用の電池も消耗してくるとそうなります。車載バッテリーのほうがこれが、発生しやすいように思います。
ラジコン用のバッテリーで、パッケージにこの瞬発力の値が示されている場合があります。(単位の名称、忘れました。おそらくCCAやRCという値です。) |
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
| |