|
 |
|
Kosan-Kun No1 Hardware Information |
|
|
|
Kosan-Kun No2 Hardware Information |
|
|
|
| |
|
|
| |
|
Casing - Cutting and alumite |
The head is acrylic. The frame making up the
body is aluminum. Basically, it is an original
product cut by myself, but some parts that are
outsourced cutting are mixed.
In the body, the exterior made with resin and
acrylic on aluminum are attached. |
|
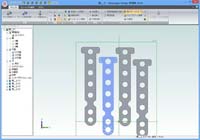 |
Create drawings of parts with CAD
software. (Drawing
of Kosan-kun No. 1)
Although it is possible to create
three-dimensional parts as long as they
can be seen without obstruction, in the
ordinary cutting, I create a plan view.
As the weight gets bigger, the movement
of the robot gets worse. So, I try to
reduce weight as much as possible. For
example, devise a way to preserve a
certain degree of strength and cutout
some parts.
See Production of CAD
data and aluminum cutting by CNC. |
|
 |
I will put the
parts designed by CAD on a cutting
machine called CNC.
The left picture is CNC called BLACK II.
You can puncture the screw hole to the
correct position.
Although aluminum plate is sold at DIY
shops, strength is weak, so I recommend
purchasing from robot parts specialty
store.
Cutting the aluminum with a drill and
cut out the parts takes time. Even small
parts can take several hours to cut.
If you do not have CNC, you can order
aluminum cutting service at a store
selling hobby robot parts etc. If you
send CAD data such as DXF format, the
shop cuts the aluminum and sends it
back.
When purchasing CNC, the point is how
wide you can cut. For example, if the
largest cutting surface is 20 cm × 15
cm, the size of the largest parts that
can be produced will also be this size.
See Production of CAD
data and aluminum cutting by CNC. |
|
 |
Since
bare aluminum does not look good, attach
the exterior made with acrylic or resin
to the portion to the blank
spaces. I design parts with 3D software
for 3D printers. Unlike CNC, 3D printers
can create complicated stereoscopic
solids that can not be seen through.
As with CNC, when purchasing 3D
printers, it is the point that how wide
it can produce. The left is a low price
3D printer called Da Vinci. |
|
 |
Cutting
aluminum results the color of metal as
it is. It does not look good, so I will
process coloring called alumite. You can
paint parts with ordinary paint, but it
will be bald a little. Since alumite
performs chemical processing, it seems
that the color of the material itself.
Unlike ordinary painting, alumite has
limitations on the color that can be
selected. Particular attention should be
paid to white. White alumite can not be
made because there is no dye. When
placing orders by saying "white" or
"white" to the trader, things that are
transparently alumite return. The right
picture robot uses parts alumite to
green and orange. It is common for
metallic texture to remain even after
alumite.
A kit for selling alumite at home is
sold, but you can also order from an
agency. You can look for places where
you can order a small number of parts of
alumite on the net. |
|
|
|
| |
|
Assembly |
|
Combine the cut aluminum and acrylic to assemble
the robot. |
|
 |
Bend
aluminum parts as needed. It is almost
always bent to 90 degrees.
Machines for bending aluminum are very
primitive. It is a feeling that bends a
little by sandwiching an aluminum plate
in a machine. |
|
 |
There are
also tools for bending small parts. It
is a product called a pocket vendor.
I think that you can imagine how it
works from the photograph. We hold the
parts and bend it manually with the two
tools. |
|
|
Screw each
part with screws. In hobby robots
appearing in battle tournaments etc., in
many cases screws are used called M2.
Many things around this servo motor are
of this size.
Since there is a possibility that the
screw will break if there is not enough
strength, we choose the one that is as
strong as possible. |
|
|
|
| |
|
Controller (control board) |
Kosan-kun's servomotors
are basically made by Kondo Science.
There are two types of controllers: serial type
and PWM type. Kosan-kun No. 1 is PWM type,
Kosan-kun No 2 is serial type. |
|
 |
PWM is a
device type that is also used for PC FAN
controller.
Probably, it is operated by the
frequency of the signal output from the
signal line.
In the case of PWM type, each servomotor
must be wired to the controller.
There is a disadvantage that wiring is
messed up.
The left is the controller around
Kosan-kun No. 1.
There are 24 servos and cables, so I
summarize with tubes. |
|
 |
In the
case of the serial type, it is possible
to daisy-chain the servo motors.
The left is the controller around
Kosan-kun No 2.
Since the controller only has cables for
only head, right hand, left hand, right
foot, and left foot, the wiring is
clearer. |
|
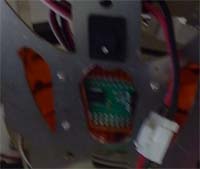 |
The green
area is the back side of the controller.
Touching the metal or wetting with water
will cause serious damages. |
|
|
|
| |
|
Actuator |
|
Kosan-kun's servomotor is basically
made by Kondo Science.
Unlike a normal motor (called DC motor), the
servomotor can stop at any specified angle. As
DC motor supplied power, it continues to turn.
The servomotor stops at the angle specified by
the signal line and tries to stay at that angle
even if external force is applied.
As with the controller, there are two types of
servo motors, serial type and PWM type.
Kosan-kun No. 1 is PWM type, Kosan-kun No. 2 is
serial type. |
|
 |
PWM type
servo motors include 4024, 4013, 4014,
etc.
(As these products are made with the same size, you can easily replace
each other later.)
The point of which servo motor to be
used is torque. If the torque is weak it
will make it difficult to get up and
walking.
Although 4024 is inexpensive, the torque
is weak and the internal gear is also
made of resin, so it will crack
immediately.
4014 is high torque. The torque of 4013
is slightly lower, but the speed is
faster. Kosan-kun No.1 applies in
combination with 4014 and 4013. |
|
 |
There are
4031, 4032, 4033, 4034, etc. for serial
type servo motors.
4031 is inexpensive and weak torque.
4034 has a high torque, 4033, 4032 a
torque is dropped and the speed is
faster.
Kosan-kun No. 2 is made up of
combinations of 4032, 4033, and 4034. |
|
|
|
| |
|
Power supply unit |
|
|
|
 |
Voltages of parts that are generally
distributed include 5 V, 7 V, 12 V, etc.
5 V is the USB voltage. 7V is the
voltage used for radio controllers and
so on. 12V is the voltage of the car's
battery. Cigar socket etc is also 12V.
Since the internal voltage of the PC is
also 12 V, parts such as hard disk and
FAN operate with 12 V in many cases.
Servo motors and controllers are
available in 7V or 12V.
Both Kosan-kun No. 1 and 2 are powered
by 12V.
If it is set to 12V, it is convenient
because parts sold as accessories for
cars such as LEDs and parts of the
personal computer can be diverted as it
is.
The left blue pack is the battery. |
|
|
In order
to see the state of the battery, the
front of the robot is equipped with an
LED counter that displays bolts.
Values between 11V and 12V are
displayed. Although it should not
operate when the voltage is low,
depending on the battery, even if the
value is as low as 8 V, it seems that it
can supply the necessary power to work
properly. (It seems that it is not a
simple thing when the voltage drops to
11 V. In some cases it may work and some
cases it may not work.)
|
|
|
NiCad and LiPo
(Lithium polymer) etc are available for
a battery for robot.
Capacity is indicated in milliamps.
I want at least 800 mA. Still it can
only drive about 5 minutes. (It depends
on usage.)
I have a maximum of 2,500 mA, but it
costs more than 10,000 yen.
For charging, a charger for LiPo is
necessary. It usually comes with a
function called a balancer, in addition
to + -, a balancer terminal is attached.
Lithium polymer
requires careful handling.
|
|
 |
When a 100
V outlet can be used, it can be used for
power supply by converting to 12 V using
stabilized power supply.
Since the power unit of the PC is also
12V, it should be usable.
The left is a regulated power supply.
Using the stabilized power supply may
cause the remote control to become
ineffective. Probably, I think that
noise is contained when moving the servo
motors at once. The stabilized power
supply has a knob that corresponds to
noise, and it seems that trouble
decreases when adjusting this, but it is
not certain. Troubles of remote control
do not occur with battery for robot. I
think that trouble of this remote
control is related to the instantaneous
power of the battery described later,
but it is not certain. |
|
 |
For a car
battery, a cheap one can be bought for
about 2500 yen at Amazon.
It is a type with liquid inside, the
battery for the car is 12V, the battery
for the motor cycle is 6V.
When purchasing, since only the battery
is contained in the box, I purchase the
terminal parts for installation at the
DIY shops. It is about 500 yen. (I think
that you can connect even if you do not
have a terminal ...)
Since capacity is larger, it can be used
for outdoor events without power supply.
Unlike using with car, after using it,
you have to charge, so you need a
charger for the car's battery.
The size of the battery for the car can
be known from the model number, but the
capacity (ampere) is not clear. You can
check the capacity from the model number
on the net. |
|
|
The
performance of the battery is roughly
determined by the number of volts and
ampere, but besides that, there is
performance like an instantaneous power.
From the experience, if the
instantaneous power is low, when turning
on the robot (when the servos move all
together?), it seems that there is a
case where resetting is applied without
power and then it does not work well
after that.
It will happen if the batteries for the
robot are exhausted. I think that this
tends to occur, compare to using an
on-board battery.
This battery for radio control car, the
value of this instantaneous power may be
indicated in the package. (I forgot the
name of the unit, probably the value of
CCA or RC.) |
|
|
|
| |
|
|
| |
|
|
|
| |