AggieSat-4 and Bevo-2 放出展開

● (No.900) AggieSat-4 and Bevo-2 放出展開 (2016年1月29日)
------------------------------------------------------
AggieSat-4(AGS4)衛星は、LONESTARキャンペーンの第二ミッションにおける50kg
以上ある衛星である。LONESTARミッション2 は、テキサス大学オースティン校の
AGS4 と Bevo-2 により構成されている。
[注] LONESTAR: Low-Earth Orbiting Navigation Experiment
for Spacecraft Testing Autonomous Rendezvous and Docking
(衛星自律ランデブー実験とドッキングのための低軌道周回誘導実験)
Bevo-2 は、AggieSat-4 に収められている 3U-キューブサットであり、その結合
した衛星は、SpaceX社の Dragon CRS-7 or 8 に収納されて JSC (NASA Johnson
Space Center, NASA ジョンソン宇宙センター) に向け運ばれ、2015年に JSC の
新しい放出機構により ISS から放出される。(訳注, 2016年1月29日放出)
AggieSat-4ミッションの目的は 相対的な誘導解決法、三軸安定化、衛星間通信、
DRAGON GPSシステムの特性評価、および視覚能力を含んでいる。さらに、ISS か
らの放出後は、システムの検査 および安定化を行い、AggieSat-4 は、位置追尾
および相対的誘導操作をしながら、Bevo-2 を放出する予定である。
そして、(2度以内の)3軸姿勢決定と制御を実証すること、Dragon搬送波位相 GPS
データを収集すること、Bevo-2 放出のビデオを撮影すること(エアロスペース社
200万画素)、相対的誘導解決法を計算し クロスリンクすること、Bevo-2 を追尾
することである。
AggieSat-4 は ISS に向け、シグナス CRS-4貨物衛星で打ち上げられた。それは
軌道ペイロードシステムのための SSIKLOPS(Space Station Integrated Kinetic
Launcher for Orbital Payload Systems / SICLOPS) を介して放出される。
Bevo-2 は、NASA ジョンソン宇宙センター(JSC) の LONESTAR-2 プロジェクトの
一部であるテキサス大学のピコサット・ミッションである。LONESTAR はテキサス
大学オースティン校、NASA ジョンソン宇宙センター、およびテキサスA&M大学の
共同プロジェクトである。プロジェクトは、最終的なミッションである自律ラン
デブーとドッキング(AR&D)の実証につながる、ミッションごとに 1衛星を提供し
ている各大学のミッションのシリーズである。 LONESTAR-2 は、シリーズの第二
ミッションである。
このミッションの目的は、二つの衛星を打ち上げて軌道上で分離し、互いに撮影
するなど近接操作を実行することである。テキサス大学オースティン校の衛星は
Bevo-2 として知られている。Bevo-2 は、テキサスA&M大学の 50kg以上ある小型
衛星 AggieSat-4 から放出される 3U-キューブサットである。
LONESTAR-2 は、2016年初期に放出が予定されている。(訳注.2016年1月29日放出)
Bevo-2 は、統合された3軸姿勢決定および制御システム、冷却ガス推進スラスタ、
星の追尾と撮影の両方に使用する多目的カメラなど、いくつかの革新的キューブ
サット技術の特徴を備えている。
[原文] (C)Gunter's Space Page
The AggieSat-4 (AGS4) spacecraft, a bigger 50 kilogram satellite, for the
second mission of the LONESTAR campaign. LONESTAR Mission 2 consists of
AGS4 and Bevo-2 from UT Austin.
With Bevo-2 being a 3-U cubesat integrated into AggieSat-4, the combined
spacecraft are to be delivered to JSC for launch as soft stowage on the
SpaceX Dragon CRS-7 or 8 and release from the International Space Station
(ISS) in 2015 via JSC's new Cyclops release mechanism.
The objectives for this mission include relative-navigation solutions,
three-axis stabilization, intersatellite communications, DRAGON GPS system
characterization, and visual capability. In addition, after release from
ISS, system checkout, and stabilization, AggieSat4 will release Bevo-2 to
begin pointing, tracking, and relative navigation operations. It is to de_
monstrate three-axis attitude determination and control (within 2 degrees),
collect DRAGON carrier phase GPS data, capture video of Bevo-2 release
(Aerospace Corporation 2MP), compute and crosslink relative navigation
solutions, track Bevo-2.
It was launched onboard of the Cygnus CRS-4 cargo craft towards the Inter_
national Space Station (ISS), from where it will be deployed via the Space
Station Integrated Kinetic Launcher for Orbital Payload Systems (SSIKLOPS).
Bevo 2 is a picosat mission of the University of Texas, a part of NASA
Johnson Space Center's LONESTAR-2 (Low-Earth Orbiting Navigation Experiment
for Spacecraft Testing Autonomous Rendezvous and Docking) project.
LONESTAR is a collaborative project between the University of Texas at
Austin, NASA's Johnson Space Center, and Texas A&M University. The project
is a series of missions with each university contributing one satellite
per mission, leading to an autonomous rendezvous and docking (AR&D)
demonstration in the final mission. LONESTAR-2 is the second mission in
the series.
The goal of this mission is to launch two satellites together that will
separate in orbit and perform proximity operations, including taking
pictures of each other. UT-Austin's satellite is known as Bevo-2. Bevo-2
is a 3-unit CubeSat that will be deployed from the Texas A&M AggieSat-4
satellite, an ~50 kg nanosatellite.
LONESTAR-2 is scheduled for flight in early 2016. Bevo-2 features a number
of innovative CubeSat technologies, including an integrated 3-axis attitude
determination and control system, a cold-gas propulsive thruster, and a
multi-purpose camera that will be used both for star tracking and imaging.
[参考]
http://www.asahi-net.or.jp/~ei7m-wkt/numbr855.htm
http://www.nasa.gov/mission_pages/station/research/experiments/859.html
http://blogs.nasa.gov/spacestation/2016/01/27/student-satellites-prepped-for-deployment-from-japanese-lab/
AggieSat-4 release photos


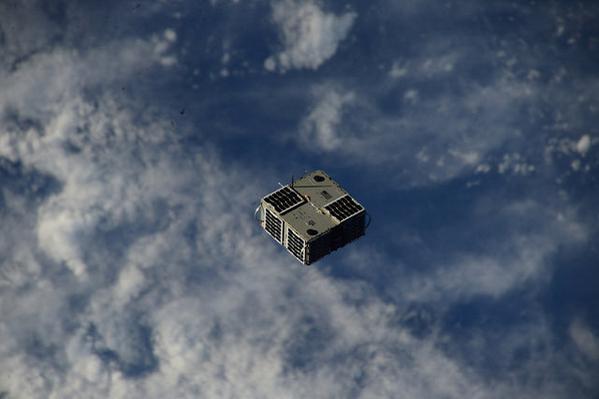 Tim Peake is a EuropeanSpaceAgency(ESA) astronaut of British nationality.
He is currently living and working on the International Space Station for
Expedition 46/47. Tim has a background as a test pilot and a British Army
Air Corps officer.
(C)Tim Peake
http://timpeake.esa.int/
http://www.facebook.com/ESATimPeake/
http://www.flickr.com/photos/timpeake/
AggieSat-4 launch video
Tim Peake is a EuropeanSpaceAgency(ESA) astronaut of British nationality.
He is currently living and working on the International Space Station for
Expedition 46/47. Tim has a background as a test pilot and a British Army
Air Corps officer.
(C)Tim Peake
http://timpeake.esa.int/
http://www.facebook.com/ESATimPeake/
http://www.flickr.com/photos/timpeake/
AggieSat-4 launch video
 (C)NASA, Texas A&M University
http://pbs.twimg.com/tweet_video/CWYCcLeUwAEtFJB.mp4
http://pbs.twimg.com/tweet_video/CZ5rx_bW0AAdrQ0.mp4
http://www.nasa.gov/mission_pages/station/research/unlikely-pair-of-satellites.html
http://www.nasa.gov/sites/default/files/styles/side_image/public/thumbnails/image/lonestar.gif
http://spaceflight101.com/pair-of-satellites-ejected-from-iss-for-in-space-navigation-exercise/
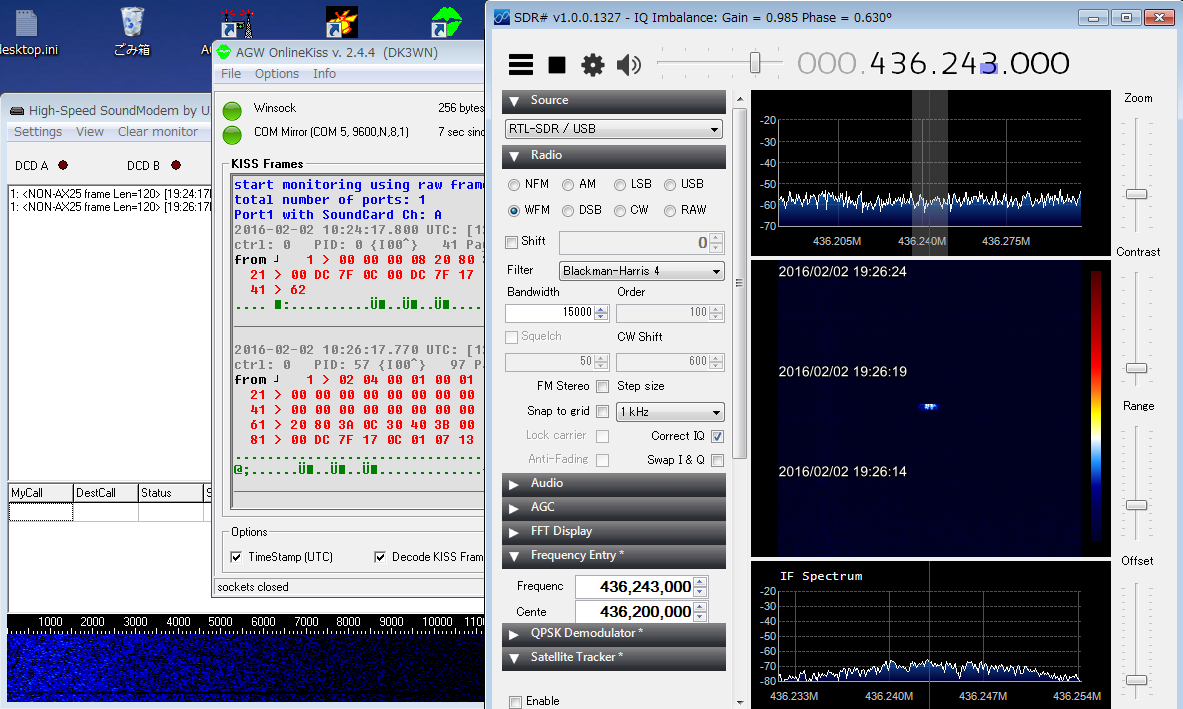
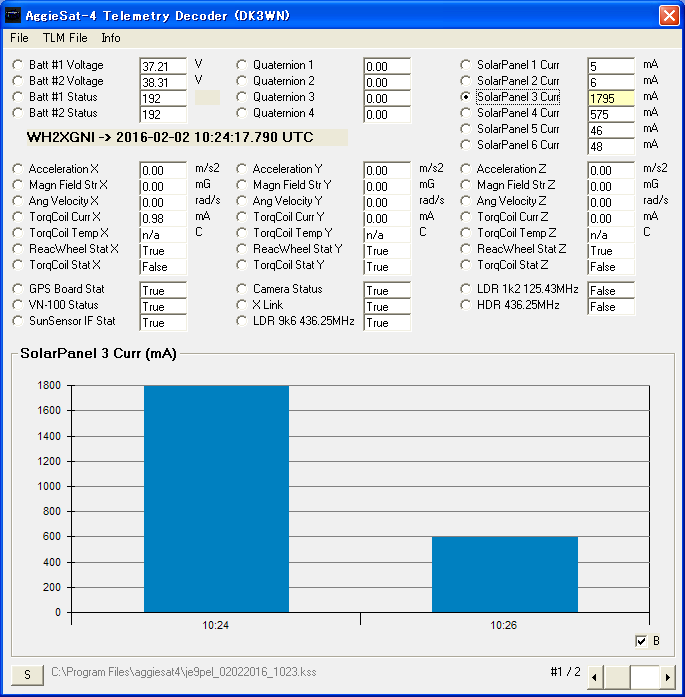
AggieSat-4 telemetry
19:19-19:28JST, 2 Feb 2016, Ele 18 W-N-NE, 436.250MHz 9600bps FSK
(C)NASA, Texas A&M University
http://pbs.twimg.com/tweet_video/CWYCcLeUwAEtFJB.mp4
http://pbs.twimg.com/tweet_video/CZ5rx_bW0AAdrQ0.mp4
http://www.nasa.gov/mission_pages/station/research/unlikely-pair-of-satellites.html
http://www.nasa.gov/sites/default/files/styles/side_image/public/thumbnails/image/lonestar.gif
http://spaceflight101.com/pair-of-satellites-ejected-from-iss-for-in-space-navigation-exercise/
AggieSat-4 telemetry
19:19-19:28JST, 2 Feb 2016, Ele 18 W-N-NE, 436.250MHz 9600bps FSK
 トップ へ戻る.
トップ へ戻る.
 前のページ へ戻る.
前のページ へ戻る.
 次のページ へ移る.
次のページ へ移る.
 ホームページ(目次) へ戻る.
ホームページ(目次) へ戻る.