 帋嶌夞楬偺婎斅
帋嶌夞楬偺婎斅
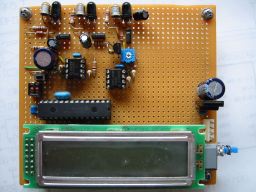
傾僫儘僌夞楬晹暘偑擖偭偰偔傞偲慡偰僨僕僞儖偺夞楬傛傝偼挷惍晹暘側偳 傕弌偰棃偰偦傟偩偗嶌惉偑擄偟偔側傞偲偄偆偺偑憡応偱偡丅崱夞偼 乽儘儃僐儞儅僈僕儞 No.11丂幚慔儅僀僋儘儅僂僗擖栧島嵗 戞係夞岝僙儞僒儐僯僢僩乿偺夞楬傪嶲峫偵嶌惉偟傑偟偨丅幚愌偺偁傞 夞楬傪尦偵偟偰偄傞偺偱偦傟傎偳戝偒側僩儔僽儖偼柍偄偲巚偭偰偄傑偡丅
偲偼尵偭偰傕偄偒側傝儅僂僗偵夞楬傪慻傒崬傓偺偼晄埨側偺偱帋嶌夞楬傪 偮偔傝傑偟偨丅崱夞偼愱梡偺俙俢僐儞僶乕僞傪巊偆姺傢傝偵PIC偵撪憼 偟偰偄傞俙俢僐儞僶乕僞傪巊偆偙偲偵偟傑偟偨丅偦偺偨傔偵PIC偺僜僼僩奐敪傪 峴偆夞楬傕寭偹偰嶌惉偟傑偟偨丅寢壥揑偵偼丄OP傾儞僾憹暆棪側偳 偪傚偭偲偄偠偭偨偺偱丄帋嶌夞楬傪嶌偭偨堄枴偼廫暘桳傝傑偟偨丅偪傚偭偲 庤娫偼偐偐傝傑偟偨偗偳丅
帋嶌夞楬偺婎斅
僙儞僒夞楬偺娙扨側愢柧傪偟傑偡丅僙儞僒偼LED偑搶幣偺TLN105偲偄偆 愒奜慄僞僀僾偺傕偺僼僅僩僩儔儞僕僗僞偑僔儍乕僾偺PT501偱丄偙傟偼 僕儍儞僋昳偲偟偰埨偔戝検偵攦偭偨婎斅偐傜奜偟偨傕偺偱偡丅憡庤偲偟偰 摨偠偔僔儍乕僾偺LED偑偮偄偰偄偨偺偱偡偑丄偙偪傜偼暿偺栚揑偵巊偭偰 偟傑偭偰僼僅僩僩儔儞僕僗僞偩偗偑戲嶳巆偭偰偄偨偺偱巊偭偰傒傑偟偨丅 嵟弶偼搶幣偺P601偲偄偆僼僅僩僩儔儞僕僗僞傪巊偆偮傕傝偩偭偨偺偱偡偑 僔儍乕僾偺暔偱栚揑偺惈擻偑偱偨偺偱偙偪傜傪巊偆偙偲偵偟傑偟偨丅偩偐傜 P601偱傕摨偠傛偆偵巊偊傞偼偢偱偡丅
LED偼弌椡億乕僩偵偮側偑傟偰偄偰僜僼僩偱僩儔儞僕僗僞乮D1051乯傪 ON偵偡傞偙偲偱岝傜偣傑偡丅暲楍偵揹夝僐儞僨儞僒傪擖傟偰偙偙偵 挋偊偨揹椡偱嫮偔岝傜偣傞傛偆偵側偭偰偄傑偡丅D1051偼彫宍偱妱偲 揹棳偑棳偣傞偺偱廳曮偟偰偄傑偡丅偙傟傕僕儍儞僋偱戝検偵庤偵擖傟偨 傕偺偱偡丅
庴島懁偼僼僅僩僩儔儞僕僗僞偱庴偗偨岝傪掞峈偲僐儞僨儞僒傪巊偭偨 娙扨側僼傿儖僞乕傪捠偟偨偺偪偵OP傾儞僾偱憹暆偟偰偄傑偡丅OP傾儞僾偼 LC358傪巊偭偰偄傑偡丅僨儏傾儖僞僀僾側偺偱慜偲嵍塃偺俁売強偺僙儞僒傪 偮偗傞偨傔偵偼俀偮昁梫偱偡丅係屄OP傾儞僾偑擖偭偨摨婡擻偺IC傕偁傞偲 巚偄傑偡偑丄埨堈偵儘儃僐儞儅僈僕儞偺婰帠偺傕偺傪偦偺傑傑巊偄傑偟偨丅
OP傾儞僾偱憹暆偟偨怣崋偼偦偺傑傑PIC偺俙俢僐儞僶乕僞偺偮偄偨 擖椡僺儞偵擖椡偝傟傑偡丅崱夞巊梡偟偨PIC16F876偼側偤偐俙俢僐儞僶乕僞 傪俁偮巊梡偡傞応崌楢懕偟偨億乕僩偵偼側傜偢丄搑拞偱堦偮旘傫偩暲傃偵 側偭偰偟傑偄傑偡丅巇條偲偼偄偊偪傚偭偲巊偄偵偔偄偱偡丅
俙俢僐儞僶乕僞偺弌椡偼PIC偺億乕僩偐傜扨弮偵弌椡偡傞傛偆偵偡傞 梊掕偱偡丅傾僪儗僗僶僗偲僨乕僞僶僗偺僀儊乕僕傪億乕僩偵帩偨偣偰 俁偮偺僙儞僒傪傾僪儗僗僶僗偱愗傝懼偊偰僨乕僞僶僗傊僨乕僞傪弌椡 偡傞宍偵側傝傑偡丅偙偺偁偨傝儘僕僢僋偱夞楬傪慻傓戙傢傝偵PIC傪巊偭偨 偙偲偵側傞偲巚偄傑偡丅 嵟廔斉偺夞楬偼偙偺傛偆偵側傝傑偟偨丅偙傟傪儅僂僗偺慜偺晹暘偺 婎斅偵慡偰慻傒崬傫偱俀侽僺儞偺僐僱僋僞偱儊僀儞婎斅偲偮側偖梊掕偱偡丅 偙偺傛偆側愝寁偵偡傞偙偲偱僙儞僒晹暘傪撈棫偟偨僽儘僢僋偲偟偰埖偆 偙偲偑壜擻偵側傝傑偡丅
僥僗僩梡偺僜僼僩傕嶌惉偟傑偟偨偑丄LED傪岝傜偣偰偐傜丄僨乕僞儂乕儖僪 傪峴偆傑偱偺帪娫偺挷惍側偳偼傗偼傝俀ch偺僔儞僋儘偑偁傞偲曋棙偲姶偠傑偟偨丅 偲傝偁偊偢揔摍側抣傪擖傟偰帋偟偰傒偰堦斣寢壥偑傛偐偭偨傕偺偵偟傑偟偨丅
偙偱婎杮愝寁偼廔傢傝傑偟偨丅幚嵺偵儅僂僗梡偺婎斅偲偟偰惢嶌偟偨傕偺偼 偙傫側姶偠偱偡丅
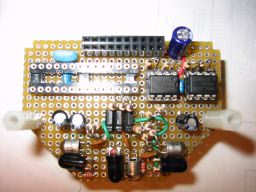 儅僂僗偺僙儞僒婎斅
儅僂僗偺僙儞僒婎斅
夞楬偑姰惉偟傑偟偨偺偱丄師偵PIC偺僜僼僩傪嶌惉偡傞昁梫偑偁傝傑偡丅 帋嶌夞楬偺婎斅傪巊偭偰愒奜慄LED傪岝傜偣偰僼僅僩僩儔儞僕僗僞偺 偺抣傪俙俢曄姺偡傞晹暘偼嶌惉偟傑偟偨丅偦偺寢壥傪億乕僩偐傜弌椡偡傞 晹暘傪晅偗壛偊傟偽偄偄傢偗偱偡丅
崱夞偼妱傝崬傒傪偮偐傢側偄偱丄儖乕僾曽幃偵偟傑偟偨丅俁偮偺僼僅僩僩儔儞僕僗僞 偺抣傪弴斣偵庢傝崬傒傑偡丅偙偺娫妘偱偡偑丄嵟弶偼俙俢曄姺偺偨傔偺帪娫傪 巊偆偩偗偱偳傫偳傫峴偭偰偄偨偺偱偡偑丄偦傟偩偲丄愒奜慄偺LED偼偐側傝 敪擬偡傞偙偲偑暘偐傝傑偟偨丅墦偔傑偱應掕偱偒傞傛偆偵柧傞偔岝傜偣傞傛偆偵 偐側傝戝偒側揹棳傪LED偵棳偟偰偄傞偨傔偩偲巚傢傟傑偡丅偁傑傝應掕夞悢傪 憹傗偟偰傕偟偐偨偑側偄偟丄揹抮傕徚栒偡傞偩偗側偺偱丄娫偵僂僄僀僩傪 偄傟偰栺5ms偱俁偮偺僼僅僩僩儔儞僕僗僞偺抣傪庢傝崬傓掱搙偵偟傑偟偨丅
僨乕僞偼俁偮偺僼僅僩僩儔儞僕僗僞偺抣傪俀bit偱昞偟偰偦傟偧傟偺傾僪儗僗傪 巜掕偝傟偨傜偦偺抣傪億乕僩偵弌偡傛偆偵偟傑偟偨丅俙俢曄姺偟偨抣偼堦扷曄悢偵 曐懚偟偰偍偄偰丄僨乕僞巜掕偺傾僪儗僗傪撉傒庢偭偨抜奒偱億乕僩偵弌椡偟傑偡丅 偙偺傛偆偵僨乕僞撉傒庢傝偲俙俢曄姺傪旕摨婜偵偡傞偙偲偱儊僀儞俠俹倀懁偼 俙俢曄姺帪娫側偳婥偵偟側偄偱億乕僩傪撉傒庢傞偺偲摨偠姶妎偱嫍棧應掕偺寢壥傪 撉傒庢傞偙偲偑偱偒傑偡丅
曄悢偵曐懚偟偰偁傞抣傪億乕僩偵弌椡偡傞張棟偼僂僄僀僩張棟偺娫偱峴偆傛偆偵 偟傑偟偨丅傾僪儗僗億乕僩傪撉傒庢偭偰偦傟偵傛偭偰俁偮偺偳偺曄悢偺抣傪 弌椡偡傞偐寛傔傑偡丅偙偺帪偵偳偺傾僪儗僗偱偁偭偰傕幚峴偡傞柦椷悢偑摨偠偵 側傞傛偆偵僟儈乕偺柦椷傪擖傟偰丄僂僄僀僩帪娫偑堦掕偵側傞傛偆偵偟偰偄傑偡丅 俙俢曄姺偟偰偄傞娫偼偙偺億乕僩偵弌椡偡傞張棟傪峴傢側偄偺偱丄偳偆偟偰傕彮偟 帪娫偑嬻偄偰偟傑偄傑偡偑丄傾僪儗僗偑曄壔偟偰偐傜100兪s埲撪掱搙偱億乕僩偵 抣偑弌偰偔傞傛偆偵側傝傑偟偨丅傕偆彮偟柦椷偺攝抲偲偐岺晇偡傟偽抁偔偡傞 偙偲偼壜擻偩偲巚偄傑偡丅
婎斅偼傎傏姰惉偱偡丅僜僼僩偺夵椙偲偐偺梋抧偼偁傞偺偱偡偑丄偲傝偁偊偢偼 偙傟偱堦抜棊偲偟傑偡丅屻偼LED傗僼僅僩僩儔儞僕僗僞偺埵抲偺挷惍側偳傪 峴偆昁梫偑偁傝傑偡丅
偦偺屻僥僗僩梡偺栬嬶乮傾僪儗僗傪DPW偱巜掕丄億乕僩偺抣傪LED昞帵偡傞乯傪 嶌惉偟偰挷傋偨偲偙傠僙儞僒俁僙僢僩偺偆偪堦偮偩偗戝偒偔姶搙偑埆偄偙偲偑 暘偐傝傑偟偨丅傑偩傑偩挷惍偑昁梫側傛偆偱偡丅偩偩偟帪娫偑側偄偺偱俀侽侽侾擭偺 戝夛偵偼偙偺傑傑偱弌応偟傑偟偨丅
{kind=link}