{kind=link}
 モータドライブ基板
モータドライブ基板
幸いにしてバイポーラ駆動用のICもいろいろあるようで、今回は
東芝の「TA8435H」という品番のものを使いました。このICは
モータを買ったデジットにも売っていたのですが2000円以上したので、
千石電商から一つ1100円(資料付きは1160円)で通信販売で
購入しました。
TA8435Hを使うための部品で少し特殊なものは、0.8オームの2W抵抗と
ショットキーダイオードでしょうか。0.8オームの抵抗は手に入らなかった
ので、1.5オームの1Wの抵抗は2本並列につないで使いました。
ショットキーダイオードはマニアルにあるもの(3GW42)が日本橋の
共立電子にありました。ただマニアルには3Aのものを使うように
なっていたのですが、ちょっと大きかったので1Aのものにして
しまいました。まあ、保護用なので多分壊れないでしょう。アマチュア
はこういういい加減な部品選定が許されるので楽です。ただ失敗すると
壊れますけどね。
テスト回路は、PIC16F84を使ってTA8435Hをコントロールするように
しました。今の考えでは、VisorよりPICへコマンドを送るように
してモータをコントロールするつもりだからです。ただ余り高級なことを
PICにやらせる気はありません。まあ、カウンタの代わり程度のつもり
です。速度的には十分間に合うはずなので、ロジックで組むよりこちらの
方が簡単だと考えるからです。今回のテスト回路でPICのソフトの基本的な
ルーチンの開発と検証も行うつもりです。
テスト回路ができあがりました。とりあえずモータを回すことはできました。 モータが回るととりあえず動くものが作ってみたくなります。2つのモータを回す回路をテスト回路を元にとりあえず設計してしまいました。
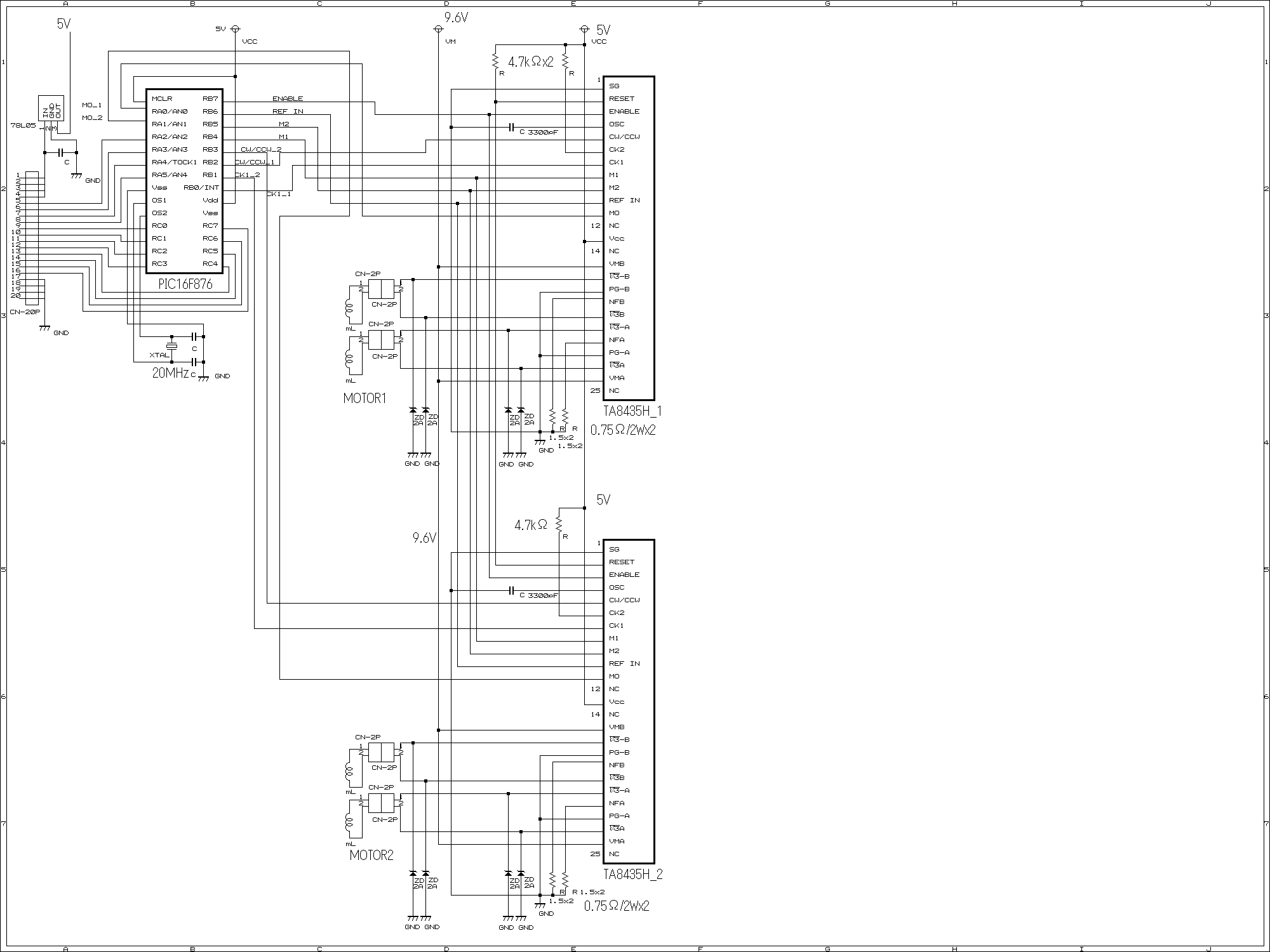
この回路を元にモータのドライブ回路を作成したました。回路は
こちらになります。PIC16F876を使ってTA8435Hをコントロールする部分はかわりません。PICからメイン基板への接続のために20ピンのコネクタをつけています。また電源をローカルレギュレートしています。これはモータの電圧9.6Vで電源をもらい基板内の三端子レギュレータでロジック用の5Vにしています。こうする事で電源線の本数を減らすことができます。基板はセンサ基板と同じ形のものをつかっています。マウスの前方にセンサ基板、後方にモータドライブ基板を配置する形にしました。
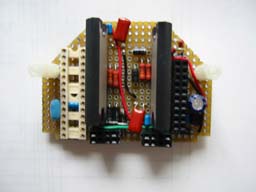
TA8435Hは結構熱を持つことがわかりましたので、後から放熱版を取り付けました。最初は付けないつもりだったので、空間がなく、鉄ノコで部分的に切って何とかおさめました。おかげでちょっと変な形になっています。
モータドライブ基板
マウスの形と大きさは、以前購入してあったフレームをベースにしています。フレームは
こちらの標準品です
マウスの幅をVisorの幅とほぼ同じ7cmとして、フレームに合わせて 全長が14cmになるようにしました。底板は1mmのアクリル板を 使っています。加工が楽なので何種類か作って試してみました。 ただ強度がアクリル板では足らないのではという不安がありましたが、あまり速く動かない現状では大丈夫そうです。でも強度が不足したらその時は同じ形のアルミ板に変えるかも知れません。
今回使用のモータがかなり薄いので、思いきりつめれば幅を5cm以下に することもできました。実際は車輪の幅もあるので全体で6~7cm位に することも可能だと思います。しかし、今回は電池の置き場所とか他の 回路の工作のやりやすさなど考えて7cm幅にしました。こうするとモータの 間に空間ができるので電池などここに置くことができるでしょうから、ちょっと大きめな手元にある電池でもつむことがでます。
今回電池は、手元にある単三タイプのニッカドを8本使いました。モータの間に4本、前と後ろの基板の下に2本づつつみました。走行中の電池の取替えは行わない前提で組んでいます。
 マウス外見、電子部品なしで組んだところ
マウス外見、電子部品なしで組んだところ
 マウス外見、基板、電池をつけたところ
マウス外見、基板、電池をつけたところ
ニッカド8本で電圧は9.6Vになります。モータが5Vであることを考えると少し電圧が低いと思います。マイクロマウスで高速にステッピングモータを回す場合多くは規格の電圧の4倍くらいの電圧をかけます。そうでないと高速で回らないという話です。まあ制御でカバーするとかモータの特性によってはOKとかあるようですが、私の場合はこの電圧で出来るところまでしかやらないという方針で行くつもりです。ぜんぜん速度が出ないようなら、又は気が向いたら、昇圧回路を考えてみようと思っています。
とりあえずモータドライブ回路ができたので、マウスを走らせるプログラムをPICにいれて、動かしてみました。少し速く動かそうとすると加減速処理(台形制御などという)を行わないと上手く走り出しませんでした。このあたり最適の加速値(回転数のアップの割合のこと)などは試行錯誤で見つける必要がありそうです。現在は、台形制御の値をPICのROMに直接書いて試していますので、微調節しながらというわけには行きません。このあたり調整方法を工夫する必要がありそうです。