婰帠堦棗 > 偙偺暸
僼儔僢僩曗惓偲僟乕僋尭嶼偺娭學
僨僕僞儖僇儊儔偱嶣塭偟偨揤懱幨恀偺僼儔僢僩曗惓偲僟乕僋尭嶼偺娭學偵偮偄偰丄
帺暘偺擣幆傪妋擣偡傞偨傔娙扨側専徹嶌嬈傪峴偭偨偺偱婰榐偟偰偍偔丅
- 偙偺婰帠偱偼僆僼僙僢僩傪Exif撪偺乽BlackLevel乿偲偟偰偄傞丅
夋憸偺僛儘埵抲偐傜偺嫍棧傪帵偡傕偺偱偁傝丄巜掕偝傟偨抣偑尨揰偲側傞丅
- 僶僀傾僗偼旕業岝帪偵偍偗傞尨揰偐傜偺曃傝傪帵偡傕偺偱偁傞丅
偡側傢偪嵟懍僔儍僢僞乕僗僺乕僪偱嶣塭偟偨僟乕僋僼儗乕儉偺婸搙暯嬒偐傜丄僆僼僙僢僩抣傪嵎偟堷偄偨傕偺偑僶僀傾僗偱偁傝丄
偦偺昗弨曃嵎偑僶僀傾僗僲僀僘偲偄偆偙偲偵側傞丅
夋憸偺峔憿偺奣擮偼埲壓偺捠傝丅
恾拞S偼怣崋儗儀儖丄D偼僟乕僋(僶僀傾僗)儗儀儖丄O偼僆僼僙僢僩偱偁傞丅
側偍嶌恾偺搒崌忋丄擇庬椶偺僼儗乕儉([Light or Flat] vs [Bias or DarkFlat])傪傂偲傑偲傔偵偟偰偄傞丅
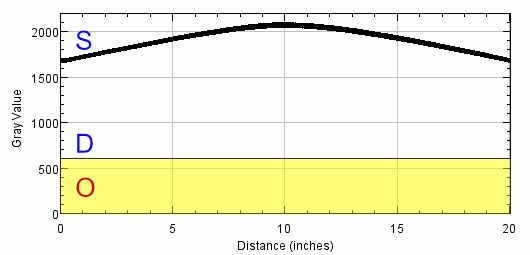
僟乕僋尭嶼偡傞偲僆僼僙僢僩抣(600)偑嵎偟堷偐傟師偺傛偆偵側傞丅
[嶲峫]
丒Siril - Synthetic biases
丒Siril - Enough with dark flats
亂専徹亃
- 慺嵽偺奣棯
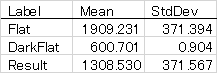
- D7200 (Offset600)
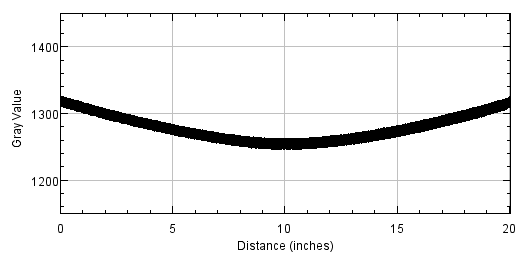
- [Light] mean1266, [Flat] mean1909
- D7000 (Offset0)
- [Light] mean889, [Flat] mean1673
- 専徹椶暿
- Light 亐 Flat
- Light 亐 (Flat - darkflat)
- (Light - dark) 亐 Flat
- (Light - dark) 亐 (Flat - darkflat)
- Light 亐 Flat 仺 LF偺婸搙偑懙偭偰偄傞応崌
- RAW僼傽僀儖弌椡
- dcraw -v -t 0 -D -4 -T "%1"
- 妋擣曽朄
- ImageJ
- Image Calculator媦傃Math偱墘嶼(32bit)
Light 亐 Flat * Flat.mean
- Plot Profile(婸搙抐柺)傪昞帵
- 旛峫
- 杮棃偼RGB枅偵忋婰偺寁嶼傪偟側偗傟偽側傜側偄偑丄曗惓忬懺偺妋擣偑偱偒傟偽椙偄偺偱徣棯偟偨丅
亂寢壥亃
-
D7200
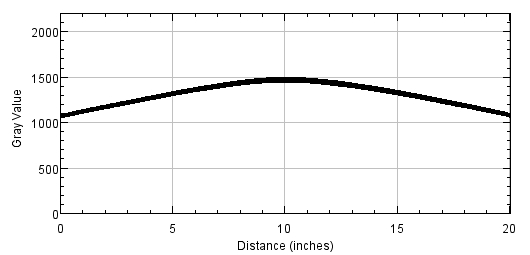
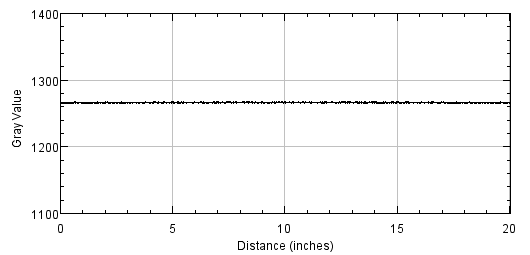
- 0,Light_unprocessed
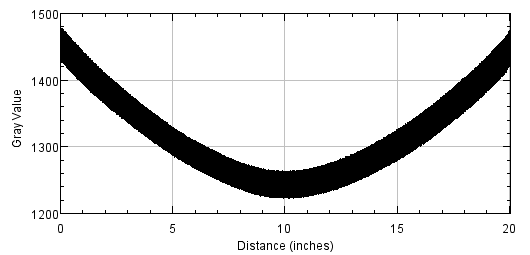
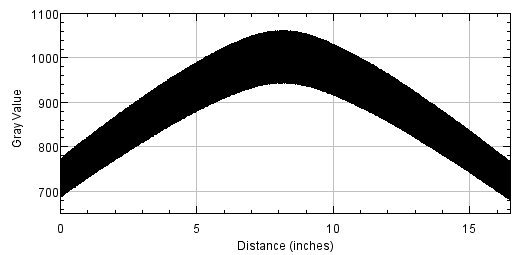
- 1,Light 亐 Flat
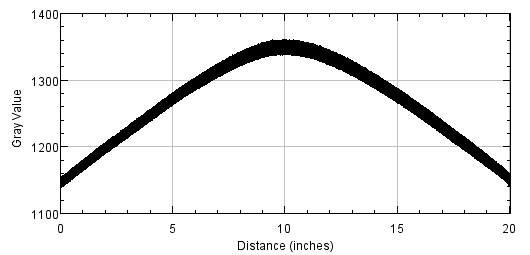
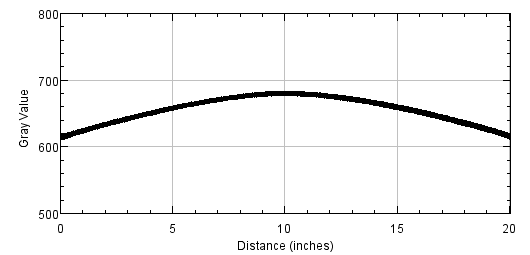
- 2,Light 亐 (Flat - darkflat)
- 3,(Light - dark) 亐 Flat
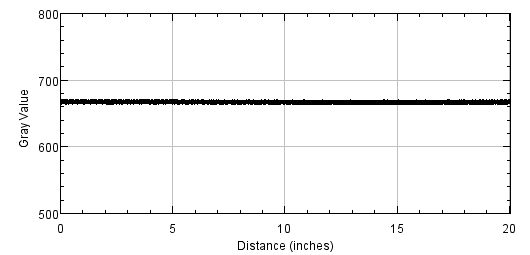
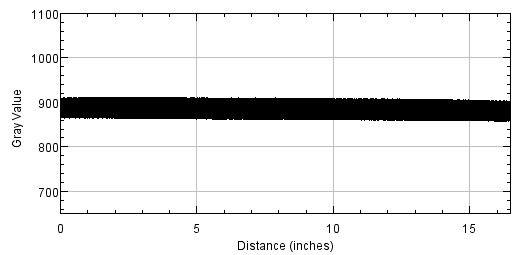
- 4,(Light - dark) 亐 (Flat - darkflat)
- 5,Light 亐 Flat 仺 L.mean1266 vs F.mean1267
-
D7000
- Light_unprocessed
- Light 亐 Flat
亂傑偲傔亃
- 僼儔僢僩曗惓傪惓妋偵惍崌偝偣傞偨傔偵偼丄儔僀僩僼儗乕儉偲僼儔僢僩僼儗乕儉偺僆僼僙僢僩傪僛儘偵偡傞昁梫偑偁傞丅
- D7200偺応崌丄僆僼僙僢僩偼600偱愝掕偝傟偰偄傞丅
(Light - 600)亐(Flat - 600)偺忬懺偱側偗傟偽丄僼儔僢僩曗惓偼惓偟偔惍崌偟側偄丅
- 捠忢儔僀僩僼儗乕儉偼屌掕僷僞乕儞僲僀僘彍嫀偺偨傔丄僟乕僋僼儗乕儉偱尭嶼偡傞偑丄
偦偺嵺偵僆僼僙僢僩偼嵎偟堷偐傟偰僛儘偵側傞丅
偙偺偲偒僼儔僢僩僼儗乕儉傪僼儔僢僩僟乕僋僼儗乕儉偱尭嶼偟側偗傟偽丄僆僼僙僢僩偺忬懺偑崌傢側偄偙偲偵側傞丅
- 偮傑傝僼儔僢僩僼儗乕儉傪尭嶼偡傞栚揑偼丄僆僼僙僢僩偺忬懺傪挷惍偡傞偨傔側偺偱偁傞丅
- D7000偼僆僼僙僢僩偑僛儘偺偨傔巟忈側偄丅
- 亂曗懌亃
- 乽(L - O) 亐 (F - O)乿偺寁嶼寢壥偑惓偟偄抣(T)偱偁傞丅
1乣3偺椺偱偼T偲堦抳偟側偄偨傔崌傢側偄丅
T傛傝戝偒偗傟偽夁曗惓丄彫偝偗傟偽曗惓晄懌偲側傞丅
- T, (1266-600)/(1909-600)=0.509
- 1, 1266/1909=0.663
- 2, 1266/(1909-600)=0.967
- 3, (1266-600)/1909=0.349
- 5偺椺偼T偲堦抳偟偰偄傞偺偱丄僆僼僙僢僩傪嵎偟堷偐側偔偰傕曗惓偼惍崌偡傞丅
- T, (1266-600)/(1267-600)=0.999
- 5, 1266/1267=0.999
亂偦偺懠亃
- 僼儔僢僩曗惓偵偍偄偰僲僀僘偺嫇摦偼尭嶼帪偲摨條偲側傝儔儞僟儉僲僀僘偼憹偊傞偑丄
僼儔僢僩僟乕僋僼儗乕儉傑偨偼僶僀傾僗僼儗乕儉偺僲僀僘偼旕忢偵彫偝偄偺偱柍帇偱偒傞丅
僼儔僢僩僼儗乕儉嶣塭帪偺業弌帪娫偼丄堦斒揑偵偣偄偤偄1昩慜屻偱偁傞偙偲傪慜採偵偟偰偄傞丅
壗偐摿暿側帠忣偑側偄尷傝丄儔僀僩僼儗乕儉偲摨偠ISO姶搙傗業弌帪娫偱嶣塭偡傞昁梫偼側偄丅
- 儔僀僩僼儗乕儉偲僼儔僢僩僼儗乕儉偺婸搙僶儔儞僗偵傛偭偰丄寢壥偑曄傢偭偰偔傞応崌偑偁傞偺偱拲堄偑昁梫丅
儔僀僩僼儗乕儉偺婸搙偑僼儔僢僩僼儗乕儉傛傝崅偄応崌丄乽Light 亐 Flat乿偺傒忋婰偺僾儘僢僩偲偼
媡偵曗惓晄懌偺寢壥偲側偭偨丅
傑偨乽(Light - dark) 亐 Flat乿偱偼夵慞偺搙崌偑掅壓偟偨丅
- 僼儔僢僩僼儗乕儉偺婸搙傪崅偔偲偭偨曽偑丄崌傢偣傗偡偄孹岦偵偁傞傛偆偵巚傢傟傞丅
- 儔僀僩僼儗乕儉偲僼儔僢僩僼儗乕儉偺婸搙嵎偑戝偒偄応崌丄僾儘僢僩偺怳暆(冃偱偼側偄)偑戝偒偔側傝丄
晄嬶崌偺尨場偲側傞壜擻惈偑偁傞丅
- ImageJ偼扨弮偵悢妛揑側夋憸墘嶼偟偰偄傞偩偗側偺偱丄巊梡偟偰偄傞僾儘僌儔儉撈帺偺傾儖僑儕僘儉摍偑偁傞応崌丄
摉慠側偑傜偦傟傪嵞尰偡傞偙偲偼偱偒側偄丅
- 僾儘僌儔儉懁偑懳墳偟偰偄傞偺偱偁傟偽丄夋憸偱尭嶼偡傞偺偱偼側偔丄悢幃傪巊偭偰寁嶼張棟偡傞偙偲傕偱偒傞丅
悢幃偱張棟偡傟偽夋憸墘嶼偵傛傞僲僀僘偺晅壛傪寽擮偡傞昁梫偼側偔側傞丅
掅ISO姶搙偱僼儔僢僩僼儗乕儉傪嶣塭偟偰偄傞応崌偼丄偦偙傑偱婥偵偡傞昁梫偼側偄偩傠偆偑乧乧
- 偪側傒偵掅ISO姶搙偺僼儔僢僩僼儗乕儉傪巊偭偨応崌丄嫮挷張棟偡傞偲栤戣偑惗偠傞帠椺傕偁傞傕傛偆丅
偁傞庬偺僲僀僘偑栚棫偭偰偟傑偆偲偄偆偙偲偱偁傞傛偆偩偑丄
偙傟偼僼儔僢僩曗惓偺栤戣偱偼側偔丄儔僀僩僼儗乕儉偺S/N晄懌偵傛傞傕偺偱偁傞偲巚傢傟傞丅
懳徢椕朄揑偱偼偁傞偑丄彮偟僲僀僘傪晅壛偟偰傗傞偲栚棫偪偵偔偔側傞偐傕偟傟側偄丅
- DeepSkyStacker偼dcraw/LibRaw偺乽-d乿僆僾僔儑儞傪巊梡偟偰弌椡偟偰偄傞丅
偙偺応崌RGB偵忔悢偑擖傝丄16bit偵僗働乕儕儞僌偝傟傞偺偱丄儕僯傾儀乕僗偺張棟偱偼側偔側傞丅
儅僗僞乕僟乕僋傗儅僗僞乕僼儔僢僩僟乕僋偼僛儘埵抲偱僋儕僢僾偟偨傕偺偑弌椡偝傟傞丅
僼傽僀儖傪乽-d乿僆僾僔儑儞偱弌椡偟偰専徹偟偨偲偙傠丄僼儔僢僩曗惓偼忋婰偺慡偰偺僷僞乕儞偱惍崌偟偨丅
- 乽Set the black point to 0乿傪桳岠偵偟偨応崌(-k 0)偼丄摉専徹偲摨孹岦偺寢壥偵側傞丅
惍崌偝偣傞偵偼乽(Light - dark) 亐 (Flat - darkflat) 乿偲偡傞昁梫偑偁傞丅
偙偺僆僾僔儑儞傪桳岠偵偡傞偲婸搙偑忋偑傝丄僛儘偱僋儕僢僾偟側偄忬懺偲側傞丅
懄偪僆僼僙僢僩偑愝掕偝傟偰偄傞偺偲摨條偺忬懺偵側傞丅
偙傟偼旕悇彠偺僆僾僔儑儞偱偁傞傕傛偆丅
- RStacker偼RAW僼傽僀儖撉傒崬傒帪偵僆僼僙僢僩抣傪尭嶼偟偰偄傞丅
廬偭偰僼儔僢僩曗惓偼惍崌偡傞丅
偨偩偟晞崋柍偟偺墘嶼偱偁傞偲悇掕偝傟傞偺偱丄僛儘埵抲偱僨乕僞傪僋儕僢僾偝偣偰偟傑偆栤戣傪偼傜傫偱偄傞丅
偦偺偨傔儅僗僞乕僟乕僋偼僸僗僩僌儔儉偺嶳偺嵍懁偑寚棊偟偨宍偱弌椡偝傟傞丅
徻嵶偼暿搑傑偲傔傞梊掕偱偁傞偑丄夋憸偵夞暅晄擻側懝彎傪梌偊傞壜擻惈偲丄屌掕僷僞乕儞僲僀僘偺尭嶼晄椙偲偄偆栤戣偑惗偠傞丅
- RAP2偱偼RStacker偺傛偆側栤戣偼側偄丅
偟偐偟巊梡偟偰偄傞D7200偑僒億乕僩奜偵傕峉傢傜偢丄柍棟傗傝専徹偟偨傔妋幚偲偼尵偄愗傟側偄丅
- PixInsight傗SiriL偱偼崱夞偺専徹寢壥偲曄傢傜側偄偼偢丅
- 僨僕僞儖僇儊儔偺僆僼僙僢僩抣偼丄業岝帪娫傗ISO姶搙偵峉傢傜偢堦掕偱偁傞偑丄
擮偺偨傔妋擣偟偰偍偄偰傕椙偄偩傠偆丅
弶弌丗2022-03-09丂夵掶丗2022-07-31
(C) YamD