PIC16F690・スタティック点灯版スピードメーターの製作
(2010/09/13 ~2010/09/19)
(Last update:2010/10/15)
 |
 |
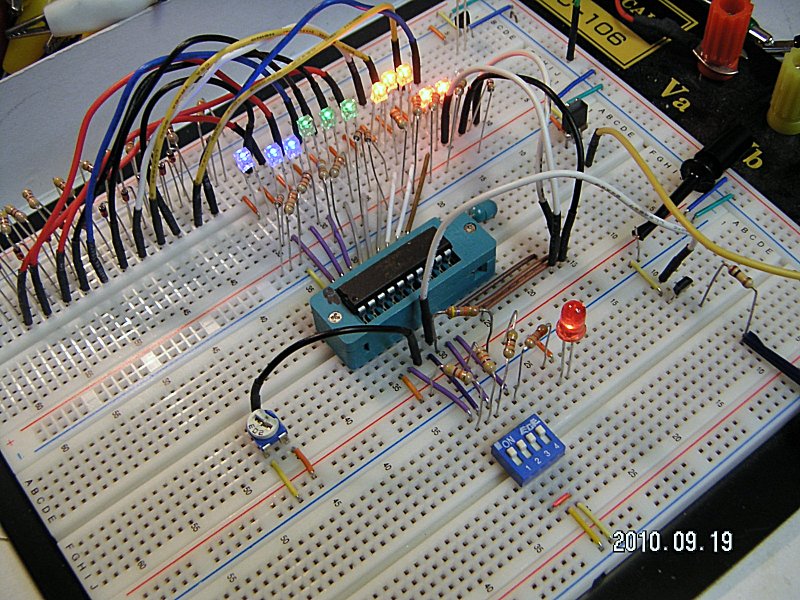
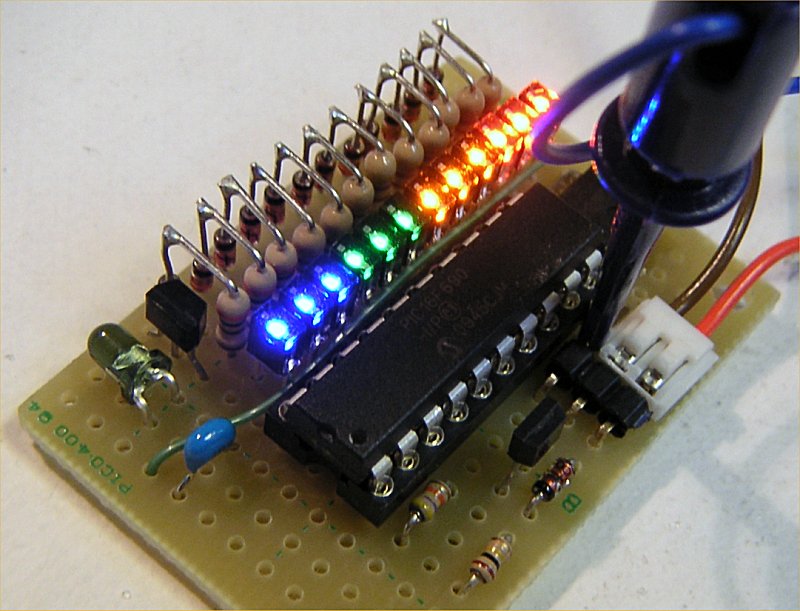
| まずはブレッドボードで動作確認 |
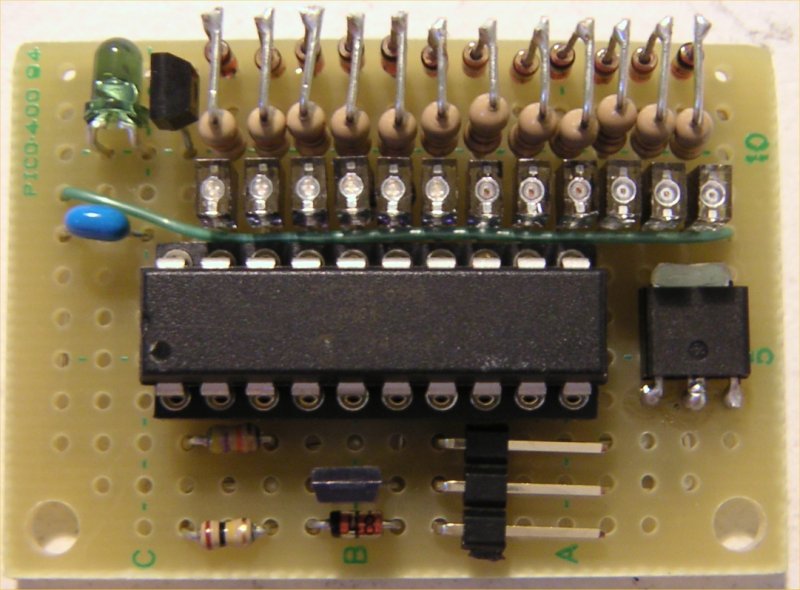
基板表。
ダイオードと抵抗は空中配線で
実装スペースを節約 |
 |
 |
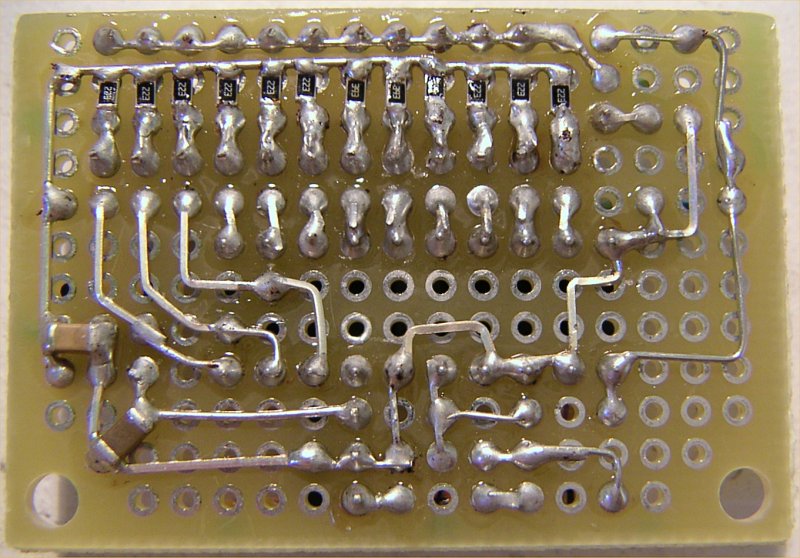
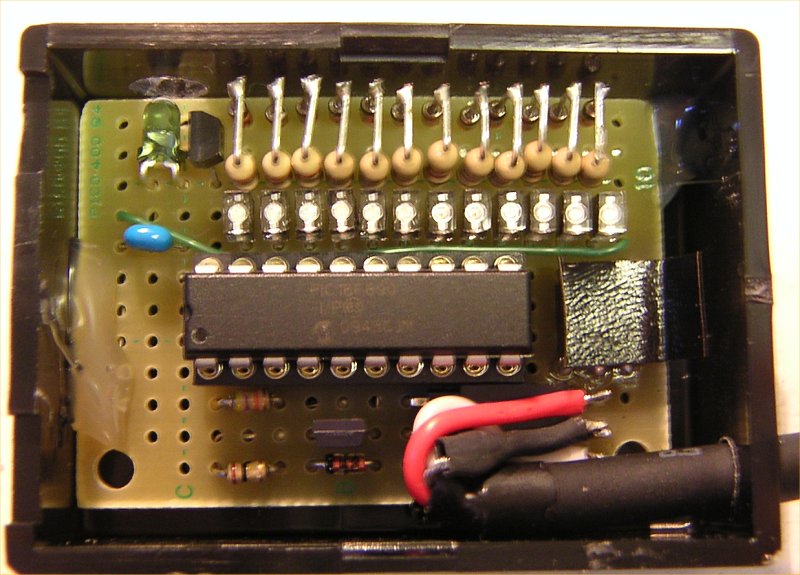
基板裏。
チップ抵抗、チップコンデンサを
使って実装スペースを節約 |
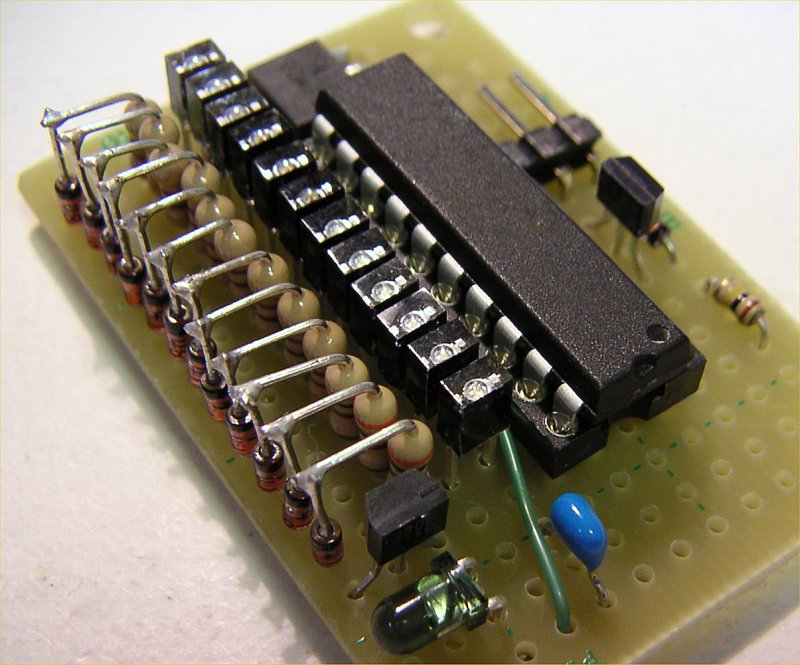
空中配線詳細 |
 |
 |
パルスジェネレーターから
正弦波を入力して動作確認中。
(写真は輝度最小状態) |
最終ケーシングの様子。
三端子レギュレーターにはフィルム
放熱シートを貼り付け、基板は
ホットボンドで固定。 |
 |
 |
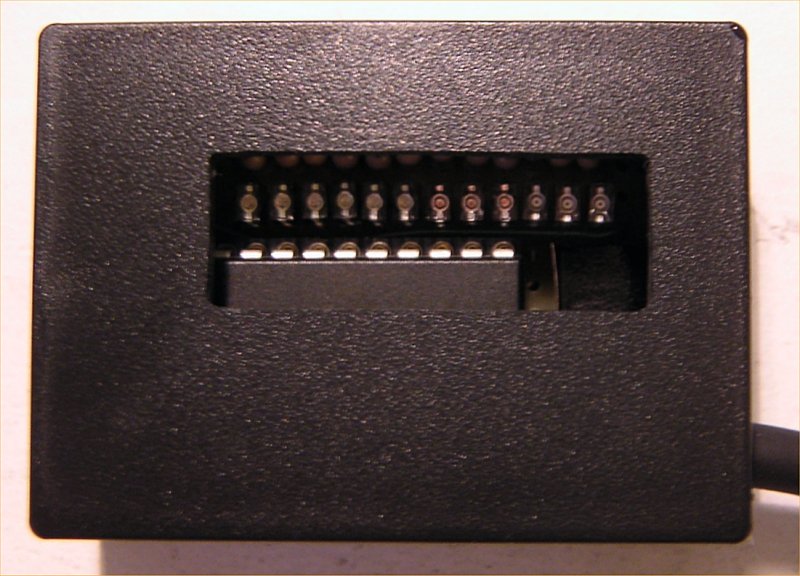
HUD 表示のため LED はケース内で
発光させ、穴を通してフロントガラスに
投影する。穴をオープンにしたまま
なのは放熱対策の意図もある。 |
設置の様子(写真中央)
明るさ検出孔のせいで一見ドライブ
レコーダーのようにも見える ^^; |
 |
|
| 新旧スピードメーター比較 |
|
 |
 |
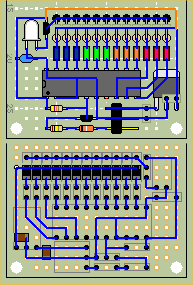
参考配線レイアウト
(レイアウトには PaaS
を使用)
4パルス、警告速度 100Km/H、
速度補正値 1.412 固定で実装。
LED 回りは空中配線もあって複雑。 |
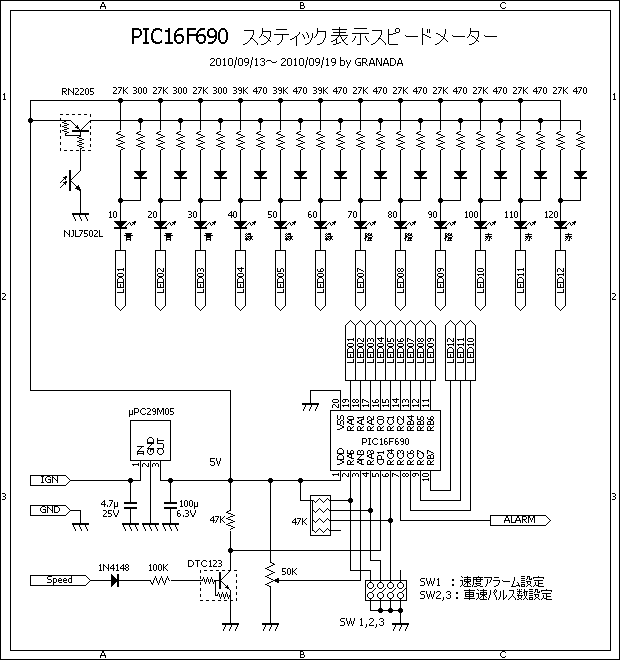
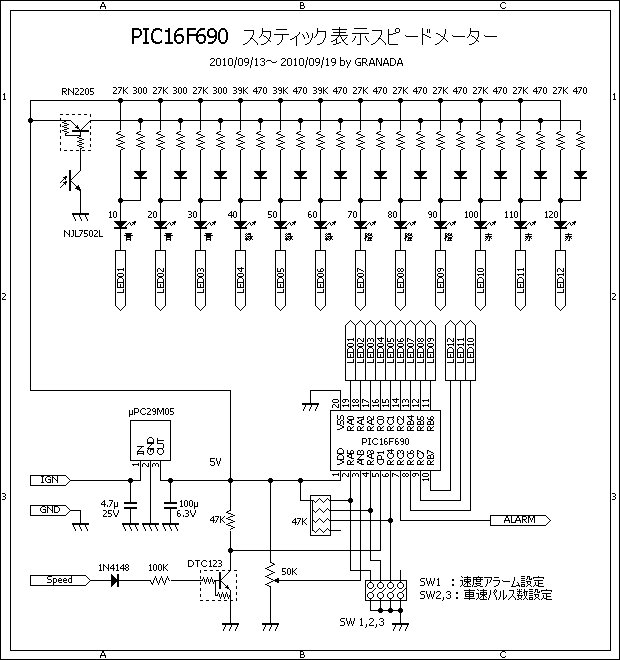
回路図 |
仕様:
前作でダイナミック点灯ではドライブレコーダーに綺麗に写り込まないことを再確認した(爆)ため、スタティック点灯で綺麗に写りこませることを目標とする。
ハードウエア:
PIC には 16F690 を使用し、LED は 10Km/h 刻みで 12個とする。余ったポートは車速パルス設定、警告速度設定用、表示速度補正用とする。
【ディマー回路 ~ LED 回り】
スタティック点灯で注意すべきなのは、全ての LED が同時に点灯する可能性がある、という点。
そのため全ての LED に電流制限抵抗を入れるとともに、ディマー回路も一捻りが必要となった。例えば明時には RN2205 から各 LED に電流が流れ込むが、ここが電流制限抵抗だけだと暗時にこの抵抗を介して他の LED に電流がバイパスされてしまい、Vf の高い青 LED が光らなくなってしまう。そこで逆流防止ダイオードを入れることとなった。(逆に、明時に流れ込む電流は暗時に流れ込む電流の電圧 5V よりも RN2205 の Vce ぶん電圧が低くなっているので逆流はせず、ダイオード不要)
また同時点灯アリとなれば、当然三端子レギュレーターの放熱にも注意が必要。今回は LED が超高輝度のため、4mA も流せば炎天下の白昼でも視認性十分なのだが、それでも最大総消費電流は 4mA x 12 + α(PIC用)で約 60mA となる。14V から5V まで電圧降下させると (14-5) x 0.06 = 0.54 W とそこそこの熱損失が発生するため、高温になるダッシュボードに設置するなら 78L05 ではシャットダウンすること必至。
そこで今回は熱容量に余裕のある μPC29M05 (78M05) を投入し、秋月で売っているフィルム状の放熱シールを貼って放熱させてみた。フィールドテストしてみたところ、炎天下で数時間ドライブしてもシャットダウンしなかったので、これで問題なかろう。
ソフトウエア:
最低限必要なポートは LED用 x 12、車速パルス用 x 1 で合計 13 ポートだけ。5 ポートも余らせておくのは勿体無いので以下の機能を追加した。
【速度警告設定】
15Km/h(車速感知オートロック等への利用を想定) と 100Km/h をスイッチで設定する。出力は Active H だがヒステリシスは持たせていないので信号を受け取る側で適宜処理すること。
| 警告速度 |
SW1 |
| 15Km/h |
OFF |
| 100Kh/h |
ON |
【車速パルス設定】
2,4,8,16 パルスをスイッチで指定する。ソフト的には速度計算時の定数を変更すれば良いだけなので簡単。
| 車速パルス数 |
SW2 |
SW3 |
| 4 |
ON |
ON |
| 2 |
ON |
OFF |
| 8 |
OFF |
ON |
| 16 |
OFF |
OFF |
ただし実装例のように 2 ピンを GND に落とすと 4 パルスになるよう、2パルスと 4パルスの設定順が逆になっている点には注意。
【表示速度補正】
JIS 規格上は速度 = 車速パルス周波数 x 1.412 (4パルス車) のはずだが、保安基準上は 10% 程度まで速度の水増し表示が認められており、最近の車は速度をやや速めに表示するようだ。実際 GE系 フィットでは 1.5 でメーターと一致した。
そこで 1ポートをアナログポートに割り当て、周波数変換係数を 1.412 (VR 値最小) ~ 1.668 (VR 値最大)まで設定できるようにした。4パルス以外でも OK のハズだが、この補正範囲が適正かどうかは実車を持っていないので未検証(殴)
【ウォッチドッグタイマ】
今回はドライブレコーダーに移り込ませて「証拠」にすることが目的なので、いざという時に動作停止していてはシャレにならない。もちろん通常の使用条件下では PIC がハングアップすることは無いはずだが、実路上では違法 CB 車両による強烈な電波による影響も考えなくてはならない。
そこで今回はウォッチドッグタイマを使って 100ms 強毎にウォッチドッグタイマをクリアし、ハングアップを防ぐことにした。
実装:
今回は VR やディップスイッチを省略し、4パルス、警告速度 100Km/h、速度補正値 1.412 の固定設定で実装した。またややこしい LED 回りは表面を空中配線、裏面にチップ抵抗を配することで実装面積を抑えた。
ケースにはタカチの超難燃性 ABS ケース SW-T55 (W40 x H20 x D55) を使用してかなり小型に仕上げた。これをフロントガラスにできるだけ近づけて設置した(写真参照)。LED の輝度が十分なので、炎天下でも Head Up Display (HUD) で十分に視認できる。
今回学んだこと:
・ウォッチドックダイマの使い方
プログラム:
改変自由だが商用利用厳禁
謝辞:
数値演算にはこちらのライブラリを使用させていただいております。開発者に御礼申し上げます。
 [電子工作のページへ]
[電子工作のページへ]