PIC16F886・Head Up Display 電波時計の製作 (2011/01/24~2011/02/18)
(Last update:2015/10/10)
こいつがマナ板に上がった
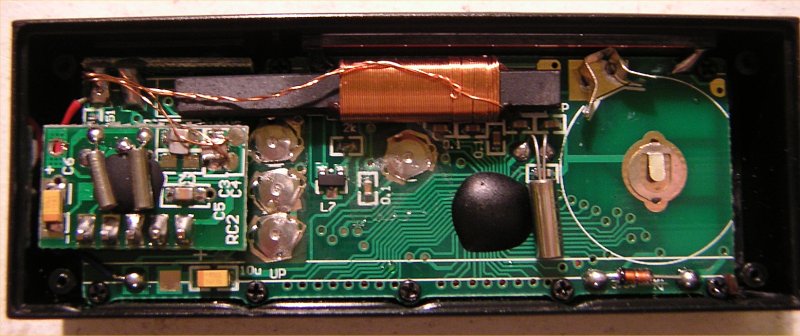
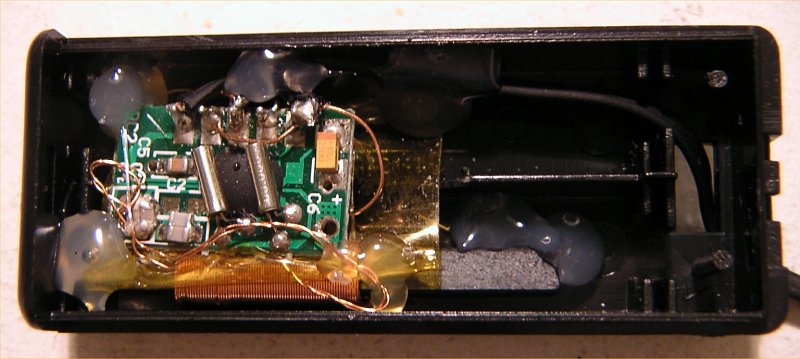
開腹してみたところ。
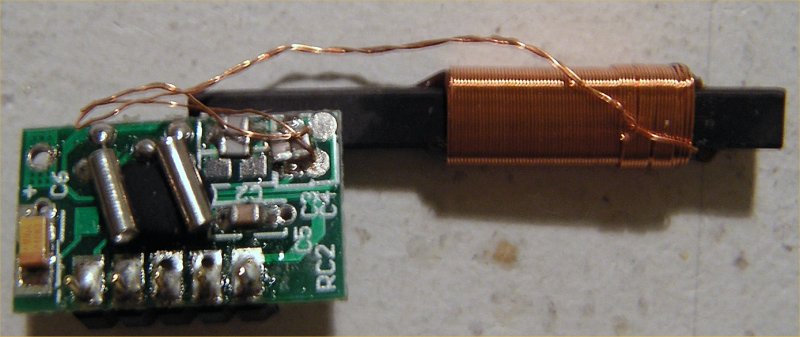
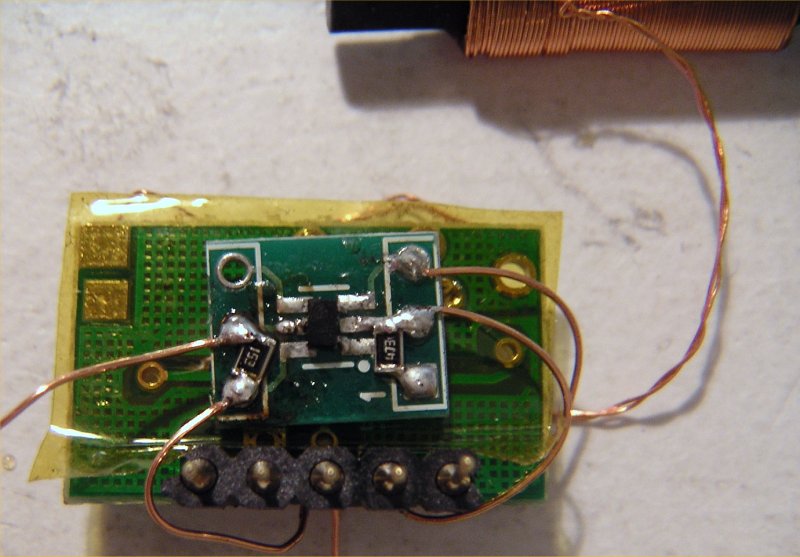
摘出した受信モジュール。
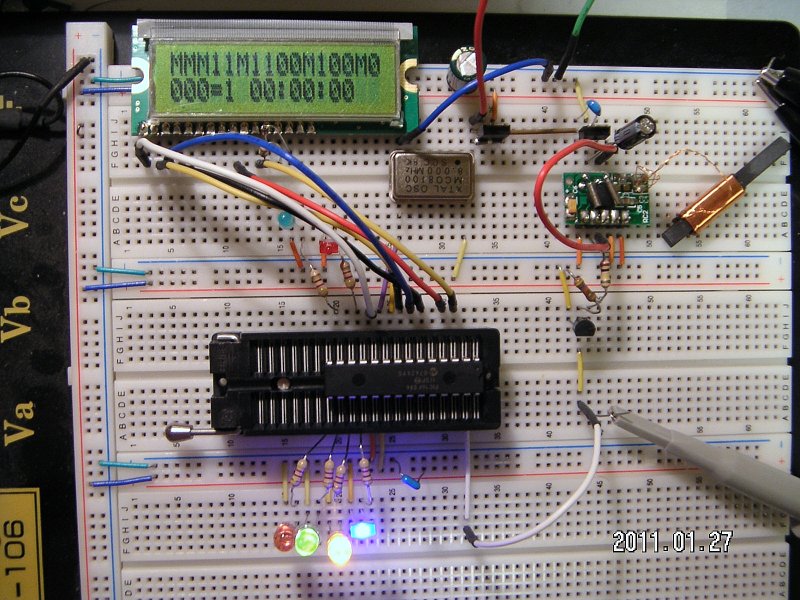
まずはパルス判定部分から
これぐらい綺麗な信号なら
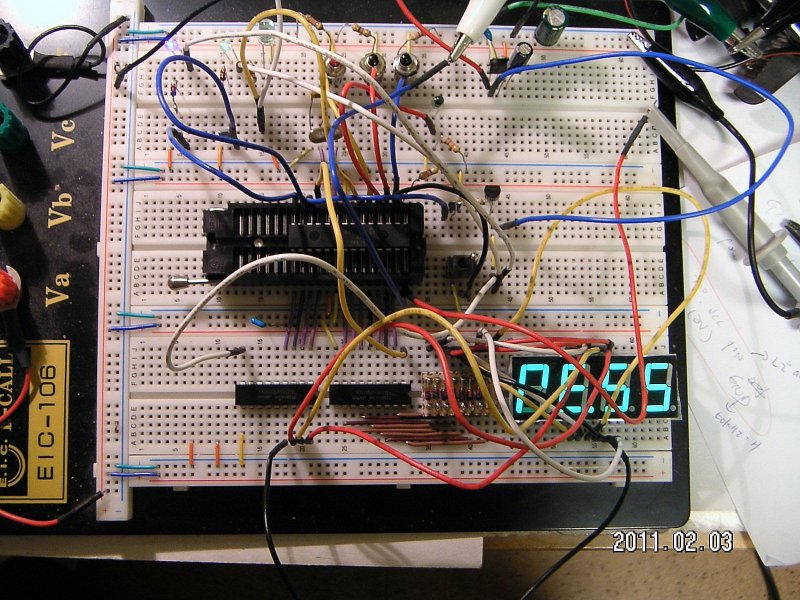
受信状態が悪くなってくると
開発最終段階
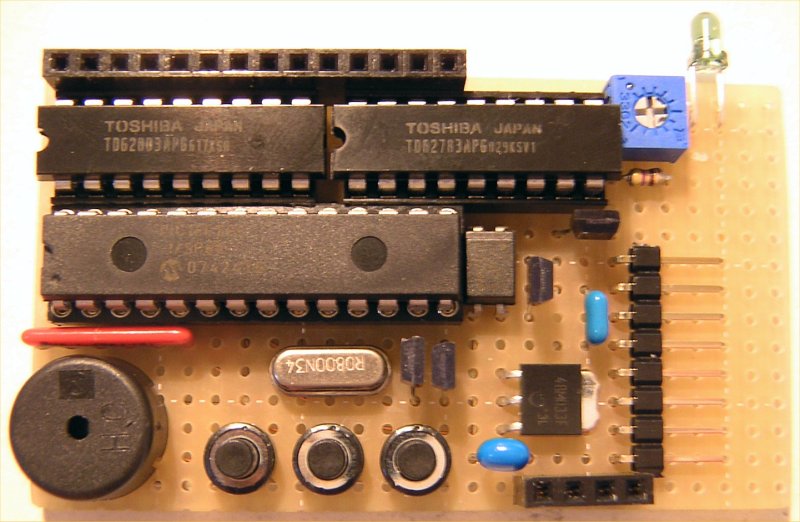
制御部表。
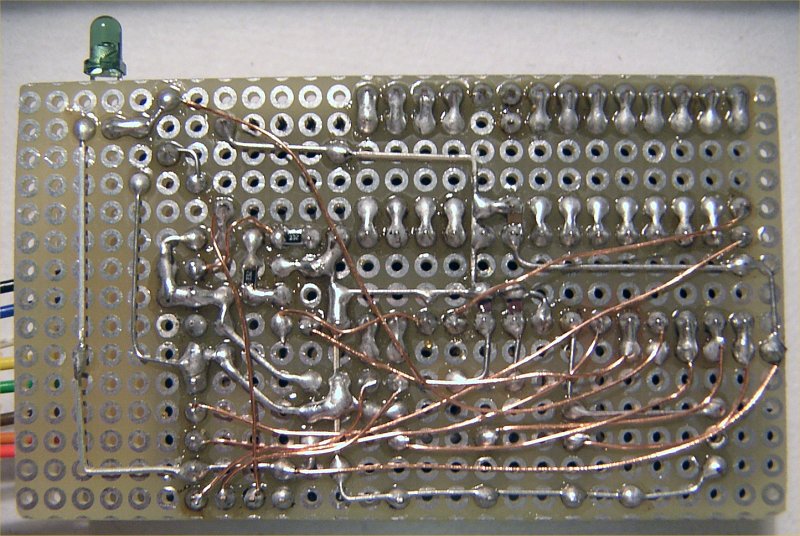
制御部裏
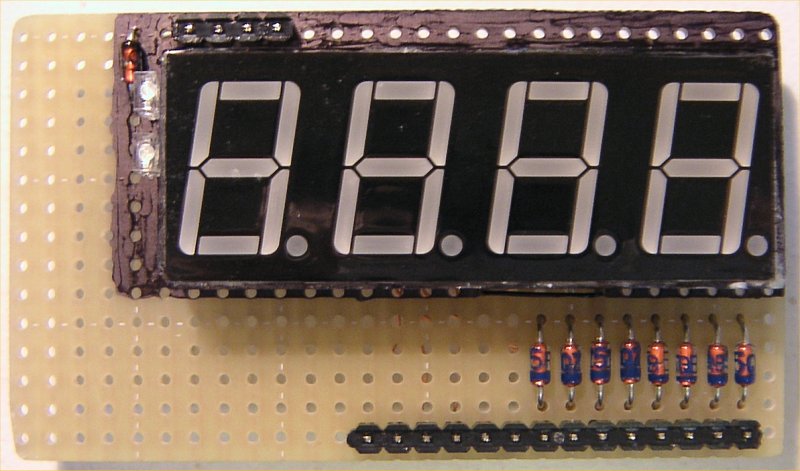
表示部表。
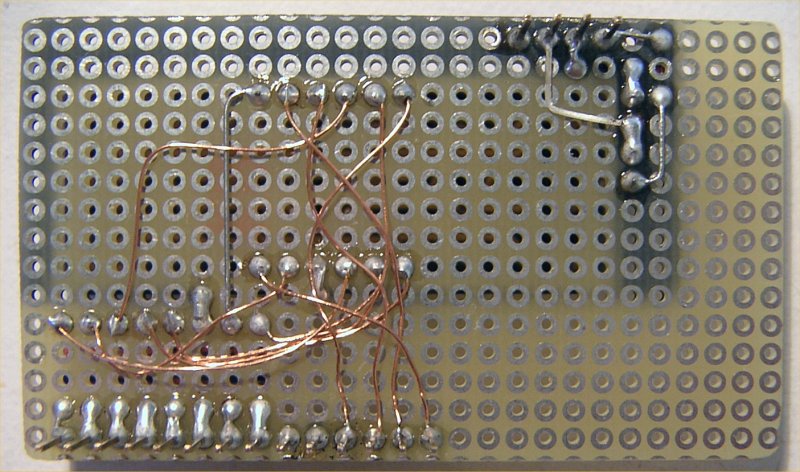
表示部裏
受信部
受信部は秋月の単四電池
受信部は表示部から
HUD 速度計 の隣に設置。
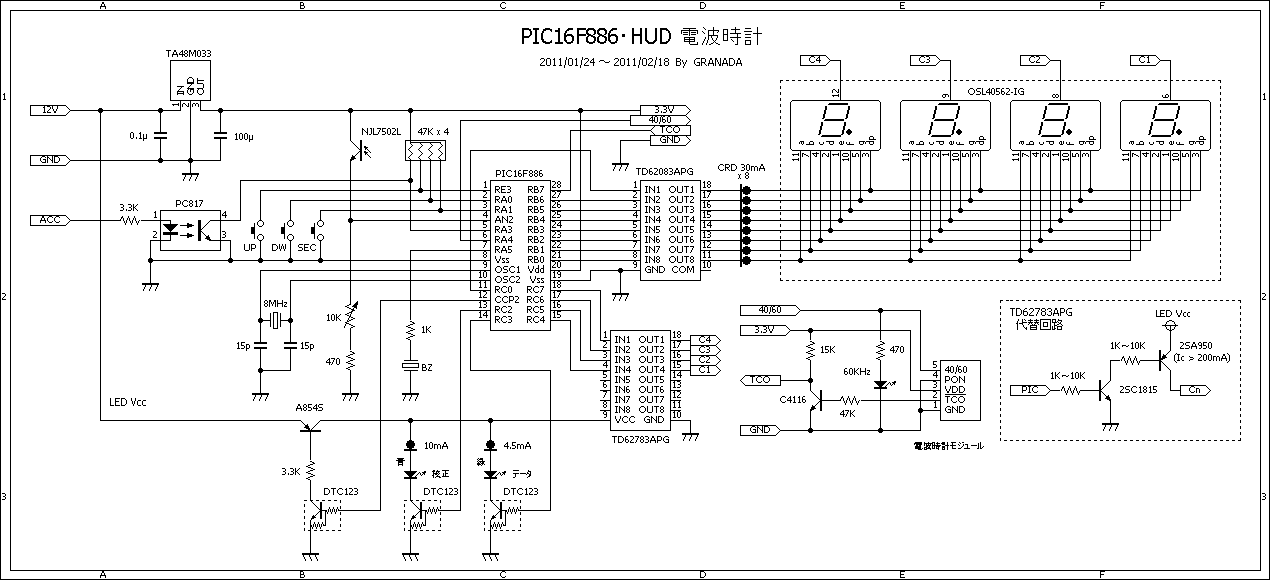
回路図
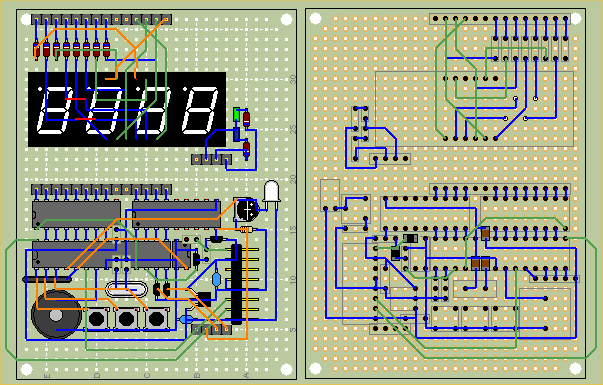
参考配線レイアウトPaaS を使用)
VIDEO
動作の様子
製作の動機: YAC
PZ-486 )を購入したのだが、電池が 1ヶ月と持たない @o@。一応太陽電池が付いているにもかかわらず、何度電池を換えてもすぐに電池切れになってしまうヘタレっぷり(商品としてどうよ)。仕様: 今回の狙い: ハードウエア: 先人の調査 によると、市販の電波時計の多くは上記
5信号が引き出されたモジュールが使われているようなので、他の電波時計から取り出したモジュールでも使える可能性は高い(電源電圧や
TCO の論理レベルは要注意)。前作 のように
DC/DC コンバーターを使うとスイッチングノイズで受信感度の低下が懸念される。ソフトウエア: 苦しめる 楽しめるオイシイところなので、先人の知恵を借りずに自分でアルゴリズムを考えてみた(まぁ誰でも同じ方式を考えつくと思うが・・・)。規格通りの綺麗な信号だけ が送られてくるならば 。実際、茨城の管理人宅は室内でも受信状態は極めて良好で、写真のような非常に綺麗な信号が受信できる。実際にキャプチャでパルスを判断するプログラムを組んで確かめたところ、電波状況が良い場所ならこの方法でも時刻をデコードできることは確認できた(まぁ、当たり前のハナシだ)。おおよその パルス幅を判断する。もちろんこの方法では正確なパルス幅は判らないが、本来
1つのパルスが複数に分断されても対処できるというメリットがある。こちら を参照。先人 は受信データを
1分間分まるまるバッファに溜め込んでデコードする方法をとっている。んー、さすがは先人、実にスマート。ありがたくこの方法を使わせていただくことに。公式サイト には、参考サイト1 、参考サイト2 、参考サイト3 )。コーディングが面倒だし、常時受信~校正しているのでどうせすぐに校正されるとタカをくくって無視方向で(汗)実装: HUD 速度計 と同じくタカチの超耐熱性プラスチックケース
SW-T75 (W50 x H30 x T75) にケーシングしたが、まだ余裕があるのでもう少し小型のケースでも収まるハズ。感想: 前作の
HUD 速度計 同様、偏光サングラス越しでもギリギリ見えるぐらいの輝度にはなった(背景にもよるが)。でもまぁ、ぶっちゃけ言うと時計は速度計ほど頻繁に見るものではないので、無理矢理
HUD にしなくても良かったかも(核爆)こんなチップ もあるようで、個人でも手に入ればいいのになぁ、と思ったり
^^; サンプル品くれないかしら(ぉぃ)改良案: 今回の失敗: 今回勉強したこと: プログラム:
謝辞: こちら のライブラリを使用させていただいております。開発者に御礼申し上げます。2011/03/13 追記: 2011/04/21 追記: 無人で運転を開始 したとのこと。2011/04/25 追記: 2011/05/09 追記:
電子工作のページへ ]