小型ローカルビジョンロボット「トレQ」
Last Updated 2002.04.10
概要
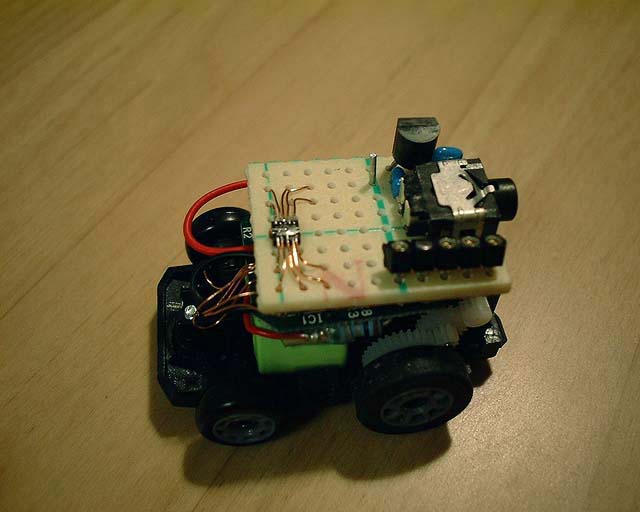
- 趣味で製作した小型の自立移動ロボット
- マイコン、モータ、電池、カメラを搭載し、自立動作が可能
- 約 1KByte のプログラムでの画像認識処理により、黄緑色のテニスボールに向かって移動
- 搭載するカメラは、京セラ製 PHS 端末用カメラ「Treva」を利用
- モータや電池を含む車体にはタカラの小型ラジコン玩具「デジQ」を利用
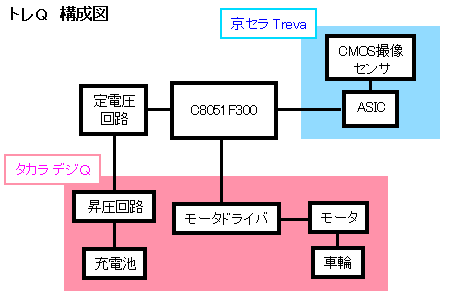
構成
下記のような構成により実現されている
Cygnal C8051F300 を採用した理由
- 超小型パッケージにより、チョロQサイズの車体内部に容易に搭載可能
- 24.5MHz の高速処理により、1秒間に約6回の画像処理が実現可能
- 内蔵オシレータでの動作により、外付け部品を定電圧回路のみで実現可能
- C言語利用により、Treva 画像取得等の既存のソースコードを即流用可能
- ソースコードデバッガ利用により、デバッグの効率化が実現可能
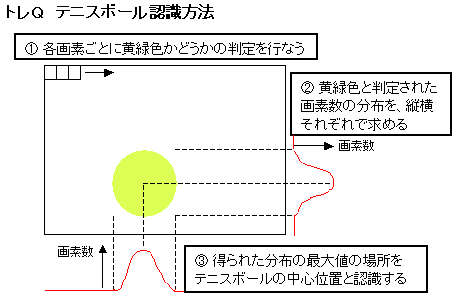
テニスボール認識方法
下記のような方法により、解像度 96x72 の画像からテニスボールの位置を認識している
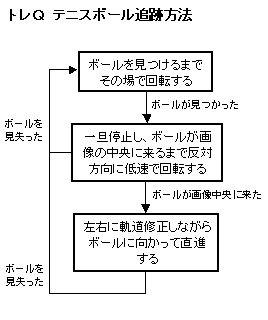
テニスボール追跡方法
下記のような手順により、テニスボールに向かって移動している
画像・動画
まいこん太郎の無謀なる挑戦に戻る
kyosuke@da2.so-net.ne.jp