 理想は手のひらの上で動くロボットアームなのですが、まだそこまでのスキルはありません。現状ロボットアームの大きさを決めているのは RC サーボです。そこで、フタバ産業で見つけて、前から気になっていた 5g サーボを使ってみることにしました。
理想は手のひらの上で動くロボットアームなのですが、まだそこまでのスキルはありません。現状ロボットアームの大きさを決めているのは RC サーボです。そこで、フタバ産業で見つけて、前から気になっていた 5g サーボを使ってみることにしました。
サーボ軸の反対側に、ケーブルを取り出す穴があいているので、ここにそのままネジを入れました。ケーブルは筐体横に穴を新設して、そこから取り出すように加工しました。ケーブルの取り回しを変えるため、制御基板から一度ケーブルを外す時がちょっとコワかったです。
ロボットアーム基部のサーボは、バイスに挟むだけなので大きさは関係ありません。そこで安価な標準サイズのサーボを使いました。
もっと自分のイメージどおりに!
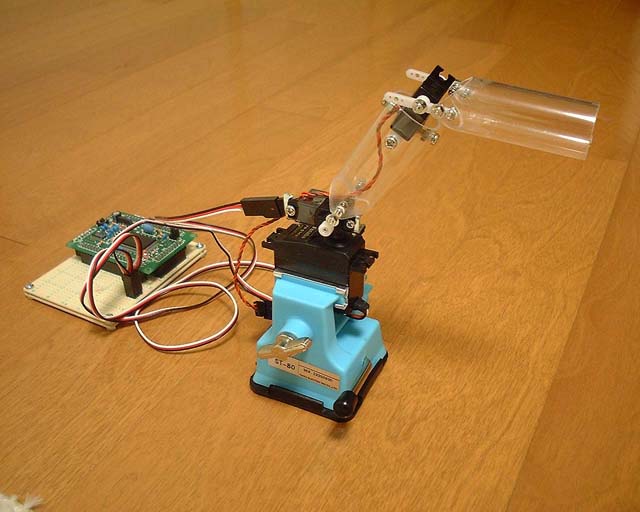
自分の中ではロボットアームの本体は筒型というイメージがあります。考えた末に、外径 22mm のポリカーボネードパイプを購入し、これを本体とすることにしました。問題はサーボの固定方法です。1号機と同じくジュラコンスペーサを使います。ボトルシップのように、スペーサを取り付けたサーボをパイプ内に押し込み、外側からネジ止めします。場所の問題で、今回は片側のみ固定となります。これだけだとぐらぐらしてしまうので、更にネジで両側から押さえつけて動かないようにして見ました。
サーボホーンとの接続部分は、パイプの先端を細く加工しネジ止めとしました。かなり強度的にはつらいです。小型サーボ付属のホーンが柔らかな素材なのも相まって、動かすとかなり振動が大きいです。見てくれは良くなったのですが、キビキビとした動きがなくなり、ちょっとガッカリです。