 Jin SatoさんのMindStorms情報局で開催されているお気軽コンテスト[タイムトライアル]へ参加するために、久しぶりに MindStorms と戯れた。このコンテストは RIS 付属のライントレースコースでタイムトライアルを行うというものだ。付属のコースは一度使ってみたいと思っていたのでちょうどいい。優勝ネライは難しそうだが、ひとつ自分で作ってみるのは悪くない。早速適当に組んでみた。
Jin SatoさんのMindStorms情報局で開催されているお気軽コンテスト[タイムトライアル]へ参加するために、久しぶりに MindStorms と戯れた。このコンテストは RIS 付属のライントレースコースでタイムトライアルを行うというものだ。付属のコースは一度使ってみたいと思っていたのでちょうどいい。優勝ネライは難しそうだが、ひとつ自分で作ってみるのは悪くない。早速適当に組んでみた。
基本的な方針は作る前から決まっていた。「地を這うようなカタチのものを作りたい!」速度を必要とするのでダイレクトドライブに決定。タイヤの大きさも自ずと決まった。ホイールベースも広くしたいので、RCX の横にモータを取り付けた。センサは先頭に吊るして地面との隙間はなるべく小さくなるようにした。底には逆皿形の自称「LEGO スベール」を置いて左右のモータ制御で方向転換をするオーソドックスなモノになった。飾りは何も付けずにシンプルなものに仕上がった。
全体の形がなんとなく十字形になったので「グランドクロス」と名づけた。そう言えば惑星が十字になるグランドクロスって今年の 8/18 じゃなかったっけ?昔の TV では引力異常で気候に影響を与えてノストラダムスの予言に行き着くような話をしていたがどうなるんだ?とゆーかその前の年に惑星直列があるんじゃなかったっけ?この前なんか2つの惑星が並んでみえた時があったよな。ううむ。
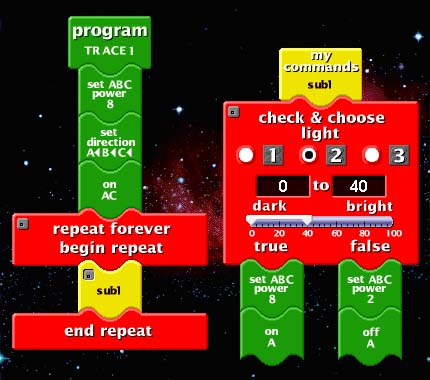 話を MindStorms 戯れ話に戻そう。プログラムはもちろん RCX CODE だ。凝った制御をしないと言う事聞いてくれないか?と思って無限ループを作って見たが、センサドリブンな制御で充分なレベルで動作したので、これで良しとする。最終的には黒いラインをはみ出した時には内側のモータは停止させたが、そのため動きがカクカクしてしまう。この辺を何とかしたいと思って内側モータパワー落としもやってみたが、ダメだった。目指すは東海大付属高校のスラローム走法だ!(この辺意味不明か?Robocon Magazine で日本マイクロマウス史を特集して欲しいな)
話を MindStorms 戯れ話に戻そう。プログラムはもちろん RCX CODE だ。凝った制御をしないと言う事聞いてくれないか?と思って無限ループを作って見たが、センサドリブンな制御で充分なレベルで動作したので、これで良しとする。最終的には黒いラインをはみ出した時には内側のモータは停止させたが、そのため動きがカクカクしてしまう。この辺を何とかしたいと思って内側モータパワー落としもやってみたが、ダメだった。目指すは東海大付属高校のスラローム走法だ!(この辺意味不明か?Robocon Magazine で日本マイクロマウス史を特集して欲しいな)
コースの紙の折り目が鬼門になっている。センサ読み取り値もちょっと変化する。しかしこのプログラムではその辺の細かい点はなんのその。ぐいぐい押しマクルぜ!
コース10周の測定結果は 40秒25 だった。意外と速いねえ。これだけ適当に作ってこの時間だと、本気出せば30秒切るモノも出るんだろうねえ。こわいねえ。タイヤを大きくするかギア比で加速させるかコーナーリングをスムーズにするか....なかなか楽しいかもしれない。ライトな気持ちで作ってみたが、色々と考えさせられるねえ。
あと思ったのはコースコンディションだ。自宅のコースではうまく動くが外で他の人と競走するとおかしな動きをするなんて簡単に起きそうだ。単純なセンサ値判定ではロバストではないねえ駄目だねえ。
(このページは 3/14 に作成しましたが、コンテストの性格上非公開にしていました)