 LEGO MINDSTORMSを手に入れて、すっかり頭がロボットになってしまった。なにげに買った「ロボットAtoZ」という本は大学の時に教わった山藤教授の本だった。ロボット学会講演集なんかも読んでみた。色々な歩行装置が試されていて面白かった。
LEGO MINDSTORMSを手に入れて、すっかり頭がロボットになってしまった。なにげに買った「ロボットAtoZ」という本は大学の時に教わった山藤教授の本だった。ロボット学会講演集なんかも読んでみた。色々な歩行装置が試されていて面白かった。
そんな中で右の写真のような機構を見つけた。2つのギアが回転するとリンクの先の交点部分が水平に広がる楕円軌道を描くのだ。実際にはこの軌道をパンタグラフで拡大するのだが、とりあえずそのままで歩行に利用する事にした。
 擬似チェビシェフリンク機構と呼ばれているようだ。チェビシェフって曲線しか知らないが、色々な所に顔を出してるのね。やっぱ偉い人は違うねえ。ちなみに参考にしたのは神奈川工科大の論文だ。田口先生というのだが、いつのまにか大学移っているようだ。
擬似チェビシェフリンク機構と呼ばれているようだ。チェビシェフって曲線しか知らないが、色々な所に顔を出してるのね。やっぱ偉い人は違うねえ。ちなみに参考にしたのは神奈川工科大の論文だ。田口先生というのだが、いつのまにか大学移っているようだ。
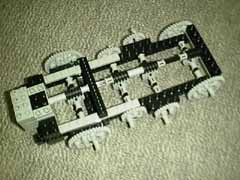
ストレートにギアを使うと2足だけでギアを使い果たしてしまう。まてよ、回転がリンクに与えられればよいので、ギアを使用する必要はないはずだ。プーリとかの使用していない部品を利用すればギアが駆動伝達に使える!と思い、早速カタチにしてみた。
 何も考えずに作ったので RCX が突出してしまった。リンクの先にはタイヤ小を付けてみた。動かすと非常に不安定だ。リンク機構がそのまま足になっているので、強度が弱いようだ。
何も考えずに作ったので RCX が突出してしまった。リンクの先にはタイヤ小を付けてみた。動かすと非常に不安定だ。リンク機構がそのまま足になっているので、強度が弱いようだ。
それだけではなく、プーリやカム部品を使用しているので、駆動軸に対しての剛性が弱いようだ。やはり見た目だけではなくこの部分にはギアを使用した方がよさそうだ。でもそうなると駆動部分はどうすればいいのだろう?
 考えた末、胴体真ん中にドライブシャフトを通し、ウォームギヤで各足駆動軸を回す事にした。これでギアもリンク回転に使用出来るし、ウォームギアでトルクも問題無いと目論んだのが甘かった。
考えた末、胴体真ん中にドライブシャフトを通し、ウォームギヤで各足駆動軸を回す事にした。これでギアもリンク回転に使用出来るし、ウォームギアでトルクも問題無いと目論んだのが甘かった。
このリンク機構は2つの回転が同期していないといけないのだが、ウォームギアが時々外れて位相がずれてしまうのだ。一度位相がずれればオシマイなので、このやり方ではダメだと言う事が分かった。
 そこでウォームギアの代わりにデフギヤーでも使用したギアを2枚組み合わせて直角に回転方向を変える事にした。多少速度は速くなるが、これで位相がずれる事はなくなった。
そこでウォームギアの代わりにデフギヤーでも使用したギアを2枚組み合わせて直角に回転方向を変える事にした。多少速度は速くなるが、これで位相がずれる事はなくなった。
しかし今の構成ではモータが出っ張ってしまうため、またもやバランスが悪く、RCX を反対側に付けても不安定になってしまう事が分かった。モータの取り付け位置をいろいろ変えてバランスの取れる場所を探してみた。
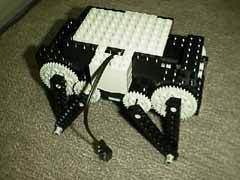
 やはりというか当然というか、モータは両足の真ん中に置くのが一番だという事が分かった。ちょっと横に出っ張るが、配置としてはなかなか良くなった。ウォームギアを復活させて、速度の問題も改善された。
やはりというか当然というか、モータは両足の真ん中に置くのが一番だという事が分かった。ちょっと横に出っ張るが、配置としてはなかなか良くなった。ウォームギアを復活させて、速度の問題も改善された。
今までの中では一番良い出来だったのだが、歩くというにはちょっと苦しい。もがいているという言葉が一番近いようだ。
 結局擬似チェビシェフリンク機構を使った4足歩行はうまくいかなかった。足の強度、駆動系の効率、全体のバランス、いろんな問題に直面した。他の人の Web ページを見ると、シンプルな構造の良さというものを痛感する。どうもいしかわが作ると重量級になってイカン。もっと精進せねば....
結局擬似チェビシェフリンク機構を使った4足歩行はうまくいかなかった。足の強度、駆動系の効率、全体のバランス、いろんな問題に直面した。他の人の Web ページを見ると、シンプルな構造の良さというものを痛感する。どうもいしかわが作ると重量級になってイカン。もっと精進せねば....