 MindStorms で何か作ったら人に見せたい!Web の写真や動画もいいけどモノホンを見せた時のインパクトはケタ違いだ!しかし広い場所が無いと移動するロボットを見せるのは難しい。フツーの飲み会で見せられるようなものは無いだろうか....
MindStorms で何か作ったら人に見せたい!Web の写真や動画もいいけどモノホンを見せた時のインパクトはケタ違いだ!しかし広い場所が無いと移動するロボットを見せるのは難しい。フツーの飲み会で見せられるようなものは無いだろうか....
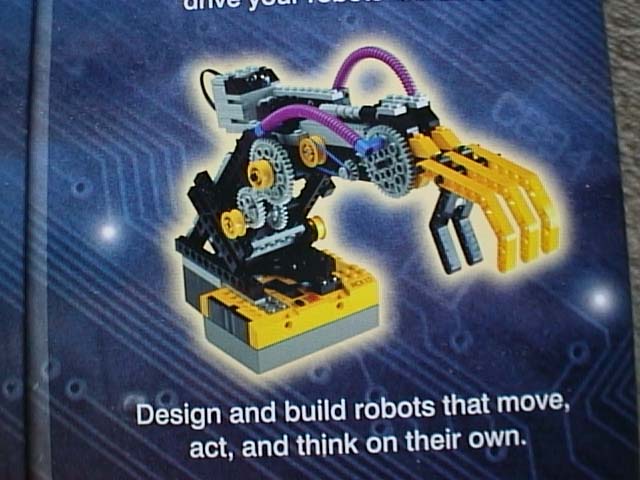
と思って改めて RIS のパッケージを見る。これだ!パッケージの右下に載っているロボットアームの写真。これなら動き回る事も無いし見た目のインパクトもあるし、何より飲み会の席ではロボットアームに掴ませるモノが机の上にいっぱいある!きっと RIS の部品だけで出来るんだろう。オリジナルでなくてもいいや、早速このとおりに作ってみよう。まずはハンド部の所からだな。
 見た通りに作ればカンタン!と思っていたらいきなりツマヅイタ。このハンドはどうやって開いたり閉じたりするんだろう?軸には何も繋がっていないようだし....
見た通りに作ればカンタン!と思っていたらいきなりツマヅイタ。このハンドはどうやって開いたり閉じたりするんだろう?軸には何も繋がっていないようだし....
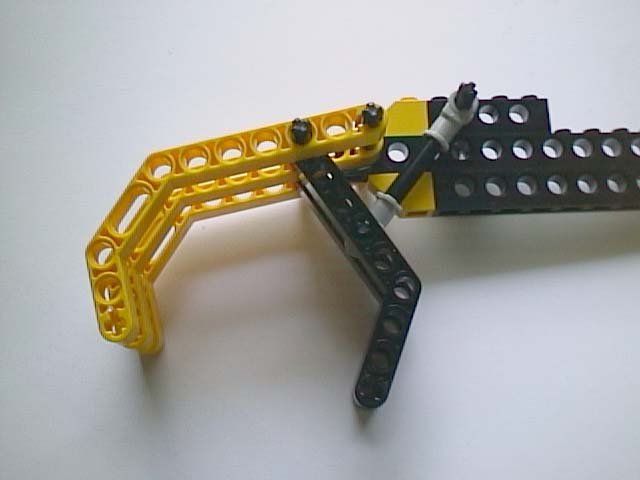
よく写真を見るとハンドの2本の黒いパーツの間に何か挟まっている。これで動かすのではないか?試行錯誤の末、左の写真のようにロッドでつなげて上の軸を回すとハンドが開いたり閉じたりするようになった。この部分をギア何段かで減速してゆっくり回すことにしよう。ウォームギヤを使ってハンドが重さで開いたりしないようにする必要があるね。この辺の機構はパッケージの写真が参考になった。
 ハンド部はそれらしくなったがアーム本体が難しい。写真を見てもどこがどうなっているのか全然分からない。仕方ないのでオリジナルで適当に作ってみた。ハンドと同じようにウォームギヤによる回転をギアで減速し、アームをギアに直接取り付けた。
ハンド部はそれらしくなったがアーム本体が難しい。写真を見てもどこがどうなっているのか全然分からない。仕方ないのでオリジナルで適当に作ってみた。ハンドと同じようにウォームギヤによる回転をギアで減速し、アームをギアに直接取り付けた。
2つのモータを独立して動かすため Ruputer を使ってコントロールした。Ruputer が初めて役に立ったような気がする。動かしてみると結構ダイナミックな動きになって楽しい。しかし調子にのってハンドで物を掴んだりするとギヤのかみ合わせが外れてアームがバタっと倒れたりしてしまう。
 原因はこの部分だ!このギヤでアームを動かしているのだが、この軸がアームを支えているので、ギヤにはアームの重さがかかってしまう。そのため回す力が足りない時にギヤのかみ合わせが外れてしまうのだろう。
原因はこの部分だ!このギヤでアームを動かしているのだが、この軸がアームを支えているので、ギヤにはアームの重さがかかってしまう。そのため回す力が足りない時にギヤのかみ合わせが外れてしまうのだろう。
結局1つの軸だけでアームを支えているのがまずいのだ。アームを支える部分とアームを動かす部分を分離してみたらどうだろう?パンタグラフ機構を使ってアームを前に出すような形に変えてみよう!
 作り直した結果右の写真のような形になった。真ん中の黄色いパーツを動かしてパンタグラフ機構で動きを拡大し、駆動点と支点の分離を実現した。前の形に比べてはるかに安定した動きを見せるようになった。
作り直した結果右の写真のような形になった。真ん中の黄色いパーツを動かしてパンタグラフ機構で動きを拡大し、駆動点と支点の分離を実現した。前の形に比べてはるかに安定した動きを見せるようになった。
しかしまだ時々ギヤが外れる時がある。アームを動かすギヤの部分を見ると上下に繋がっているが、ここが軸が通るパーツごと上下に分離してしまうのだ。トルクが足りなくて相手のギヤを回せない時、相手のギヤと離れるような力が強くなってブロックを外してしまうようだ。トルクのかかるギア後段は、パーツが分解しないようにしっかり作る事が大事だな。上下に分けずに同じビームに軸を通して絶対はずれないようにするべきなんだろう。
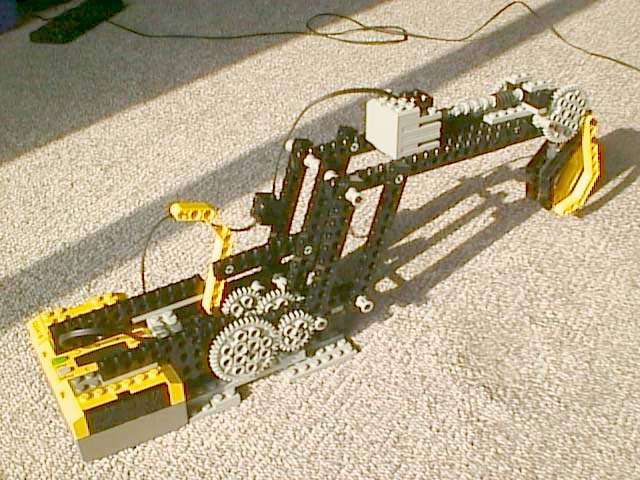 そこでアーム駆動部を大幅に変更した。ギヤを全て同じビームに軸が通るように配置して強度を確保し、パンタグラフの位置も変えてみた。ハンド部も強度的に問題があったのでギヤの使い方をちょっと変更した。
そこでアーム駆動部を大幅に変更した。ギヤを全て同じビームに軸が通るように配置して強度を確保し、パンタグラフの位置も変えてみた。ハンド部も強度的に問題があったのでギヤの使い方をちょっと変更した。
これで強度の問題も解決だ!今までよりかなり安定した動きを見せるようになった。しかし駆動部が平らになったためアームの位置が低くなり、ハンド部があまり地面から離れなくなってしまった。これではロボットアームとしては役に立たないではないか!どうする?パンタグラフを長くしてアームを高くしてみるか?
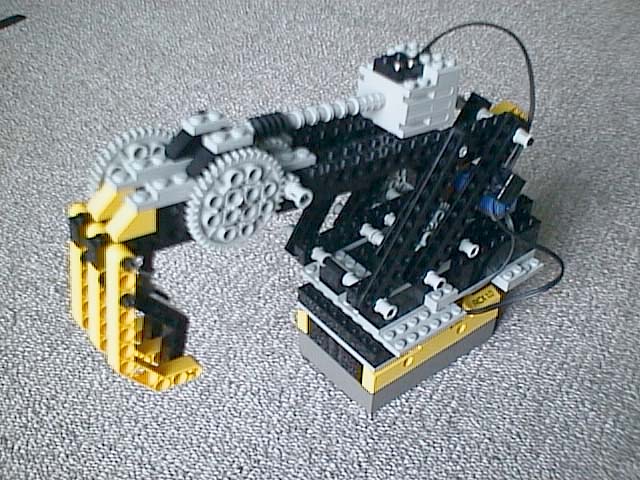 結局アーム駆動部を そのまま RCX の上に載せる事で高さを確保した。ついでにアームリミッタ用に光センサを付けてみた。これで LEGO タイヤ程度は掴んで持ち上げる事が出来るようになった。なかなか楽しい。
結局アーム駆動部を そのまま RCX の上に載せる事で高さを確保した。ついでにアームリミッタ用に光センサを付けてみた。これで LEGO タイヤ程度は掴んで持ち上げる事が出来るようになった。なかなか楽しい。
結局パッケージ写真のロボットアームに近い形になったような気がする。今よくよく見てみると、パッケージのアームはパンタグラフではなく、真ん中の部分にモータがあって、それで上のアームを上下に振っているのではと思った。今回は RIS 基本キットのパーツのみを使って作ったので自由度2のロボットだが、自由度を増やしたり走行させたりしたらもっと面白いだろう。今度やってみようか。