|
「インテリジェンス・ダイナミクス 2006」 |
|
|
「インテリジェンス・ダイナミクス 2006」 |
◆ 行ってきました「インテリジェンス・ダイナミクス2006」| http://www.sonyidl.jp/ids/ids2006/第3回、3年目のシンポジウムです。 最近、SONYはQRIOやAIBOの開発・販売を終了すると発表したので、この研究の方向が どうなるのかなというのも気になるところ。
| 「インテリジェンス・ダイナミクス2006」は予定通り2006年4月7日に開催されました。
| 700名近い参加者のもと、講演と活発な議論が行われました。 またソニー・インテリジェンス・
| ダイナミクス研究所の成果発表デモにおいても多くの意見交換がなされました。
| ご参加の皆様、ありがとうございました。
会場はこれまでと同じSONY本社のホールでしたが、参加者はこれまでに比べて 減っています。 会場に並べられた椅子は2割位あいていて、前回まではびっしりと埋まっていました。
◆ 総合的なコメント
これまでのシンポジウムで研究課題として語られていた通りの方向性に沿って、 ロボットの頭脳開発を進めてきている。脳科学をロボットに適用。
具体的には、多数の行動記憶(シェマと呼んでいた)を学習によって構築した後、 視覚入力に対応して適当な行動がアクティブに発火するように、ロボットの頭脳を 作り上げてデモもできるようになっていた。
理論的な話は過去に聞いたものの範囲を超えてはいない気がするが、それを現実に 作り上げて動いているデモを見せられる、というのはよくやったなぁと思う。
行動の種類は24個でまだ稚拙なレベルだが、基本デザインは的外れではないだろう。 デモで動くQRIOも生物っぽくなってきた(?)。
▼ 講演 http://www.sonyidl.jp/ids/ids2006/lecture.html
- 「インテリジェンス・ダイナミクス2006開催にあたって」 土井 利忠
- 前置きとして、インテリジェンス・ダイナミクス(動的知能)の定義、 知能とは何、という彼の考えを説明。
知能とは:環境に適応して自らを変化させ対応する計算能力。 最低でも10000個程度のシェマ(記憶構造)があって初めて「知能」が 発現するといえるレベルになる。今回報告のレベルではまだまだ。
- 「偶有性の脳科学 The Contingent Brain」 茂木 健一郎
- 最近テレビでも見かけることの多い脳科学者、茂木さん。
脳の柔軟性、可塑性、再構成性、あいまい性、複雑性、などについて語った (のだと思う)。 キーワードとしては、「クオリア Qualia 感覚質」「偶有性 Contingency」。 上手く説明できない。
現実世界はオープンで、無限で、あいまいな環境だが、それに対して 脳はうまく世界を把握し、柔軟に対処できる仕組みをもっている。 脳科学ではその一面がやっと解析され始めた程度で、まだまだ 脳を理解するには道のりは長い。
- 「多様な経験から生み出されるインテリジェンス・モデル」 南野 活樹
- ロボットの行動を「人がコーディングする」のではなく、ロボット自身が 学習して獲得するようにしたい、という基本方針があり、それを実現する ために「RNN-SOM」というアーキテクチャを開発した。 (RNN=Recurrent Neural Network, SOM=Self Organizing Map)
まずは「○○遊び」という24種類の簡単な行動タスクを、QRIOを用いた 人間の教示(手取り足取り教える)によりRNN学習させる。 行動タスクは例えば 「目の前に赤い風船があったらボヨンボヨンと叩く」とか 「目の前に黄色い風船があったら近づいた時にキャッチする」とか 「目の前に青いボールがあったら左右の手でゴロゴロと転がしてみる」とか 「目の前に黄色と緑のベルがあったらある順番で鳴らしてみる」とか、 視覚入力に関連付けられた動的な行動。 動的でインタラクティブなRNN行動獲得というだけでもけっこう難しそう。 その行動学習を14x14個の並列RNNによって行い、学習を進めると学習が 自己組織的に局在化する(SOM)。この辺はすごい並列マシン(IDEA)で 計算コストかけてます。
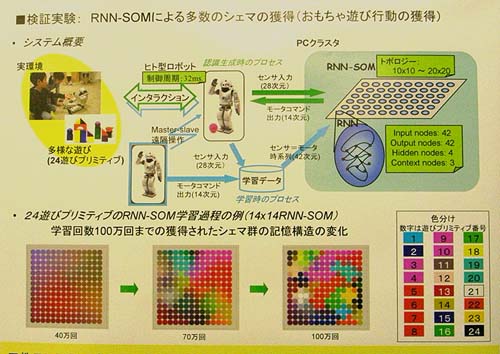
学習が済んだら、今度は動かしてみる。QRIOの視覚入力をリアルタイムで 解析・認識し、視覚内にあるカラーパターンに応じて対応する行動RNNが アクティブになり、その学習行動にしたがってQRIOが遊び行動を実行する。
これらのことを計算機アーキテクチャ上に実現し検証した。 デモもこのあたりを重点的に見せていた。 構成をデザインするだけでなく、実際に動くものができている、というのは たいしたものだ。

玉回し
風船叩き
ベル鳴らし
ドーナツ渡し
しかし、技術的なことは忘れて、最先端のロボット技術を体現してQRIOが 動いている、という観点で見てみると、それほど「知的レベルが高い」 ようには見えなくて、目の前に示されたカラーパターンに「反応」して、 記憶された行動を「再生」しているようにしか見えない。
それはまだ行動パタンの数が少なく複雑度が低いからではないか。 不明瞭な視覚パターンが入力されている時にSOMでは活性化する位置が うろうろと迷走するが、それこそが人間の「感情・意識」と呼ぶものに 近いものだと思う。行動パターンが何百、何千と増えていけば、 どの場合にどの行動をとるか、という対応はさらに曖昧で判断の 混在したものになっていくだろうし、その時にQRIOが「迷ったり」 「勘違いしたり」する様子が「人っぽい」行動として見えていくだろう。 その辺を予測し期待したい。
- 「初期発達のダイナミクス」 多賀 厳太郎
- 乳児・幼児期の行動と脳研究知見からの話。脳の発達について。
- 「子どもからみたロボット・ロボットからみた子ども
──育ちと育ての現場からみたコミュニケーションの成り立ち」 小嶋 秀樹
- 視線と体の向きを変えるだけの単純なロボット「Keepon キーポン」(可愛い) を発達障害児の養育施設、保育園などに持ち込み、数ヶ月の実験観察を行った。 ロボットはカメラを通じて人が遠隔操作する。 発達障害児は「見られている」ことに敏感で初期には近づけないが、 次第に距離を縮めてゆく。そこには特徴的なパターンがあり、 基本的なコミュニケーション要素である「アイコンタクト」「タッチ」 「共同注意」などが浮かび上がってきた。
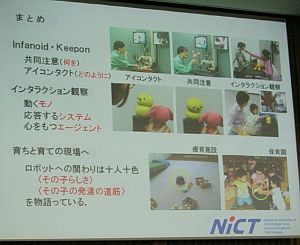
- 「人間型ロボットと乳幼児の日常インタラクションの研究
~長期的な実地観察からの知見~」 田中 文英
- 米国の保育所にQRIOを人間の子供と同じように入園させ、周囲の子供たちとの 関係を観察する長期プロジェクトの報告。 QRIOはカメラを通じて人が遠隔操作する。初期にはQRIOはよく倒されていたが、 次第に子供側がQRIOを倒さないようにハグしたりキスしたりするように 行動を変化させた。 QRIOの電池が切れて寝そべる(デフォルト姿勢)と、子供は自発的に毛布を 持ってきてかけるという行動も見られた。 明らかにQRIOは人間の子供と同等のものとして共感を得ている。
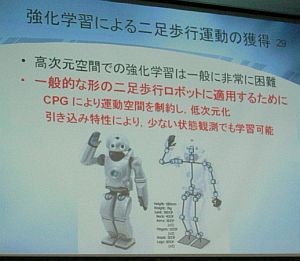
- 「生物を規範とした二足歩行運動とその獲得」 遠藤 玄
- ロボットの二足歩行を「設計者がコーディングする」のではなくて、 自律的に学習・獲得させたい。 センサとモータ出力を全部ニューラルネットにして試行錯誤学習させるという やり方もあるが、ゼロからの学習だと途方も無い労力がかかりそうなので、 一部を「生得的」な機能として利用することは*あり*にしよう。 それは2足踏出しリズムを生成する「中枢パタン生成器 Central Pattern Generator (CPG)」で、新生児や小脳のみの猫で、両足の交互踏み出し運動が 見られることに対応する。 CPGの振動パタンを用いたニューラルネットワークを構成し、計算機での 学習を 行い、さらに実機QRIOに実装して追加学習を行い、安定した 歩行動作を実現した。 CPGの引き込み特性により、不整地などの乱れに対しても、自律的に歩行を 調整するロバスト性がある。
参考研究:「鉄犬」 Link
学習の様子もビデオ紹介され、学習回数にしたがって歩行が上達するのが 見られた。確かに不整地でも倒れないように動いているが、その動きは 「ギクシャクしている」感があり、過去にQRIOが「作りこまれて」歩いていた 時のようなスムーズさは見られない。 どちらがより最適な歩行なのかは分からないが、最適化が進めばもっと 人間に近い歩き方にはなってくるだろうと思う。 ニューラルネット学習の局所解への捕まり、歩行パターンの限定 (足先の軌跡は楕円)などによる制限が影響しているのかもしれない。