 メカ製作が苦手なためか、いつも市販品で何か流用出来ないか考えてしまいます。モータが2個載っているオモチャを見るとすぐ反応してしまいます。そんな中で以前から目をつけていたのが田宮模型の壁づたいねずみ工作基本セットです。
メカ製作が苦手なためか、いつも市販品で何か流用出来ないか考えてしまいます。モータが2個載っているオモチャを見るとすぐ反応してしまいます。そんな中で以前から目をつけていたのが田宮模型の壁づたいねずみ工作基本セットです。
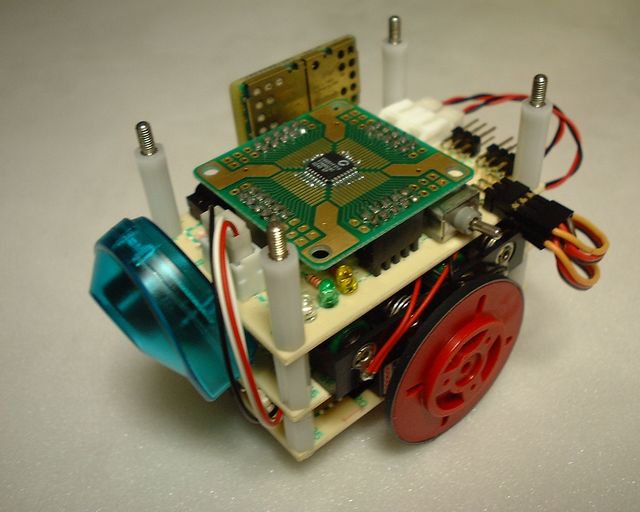
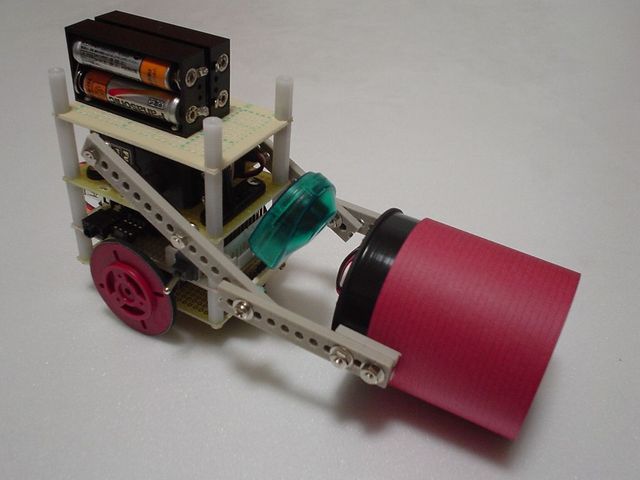
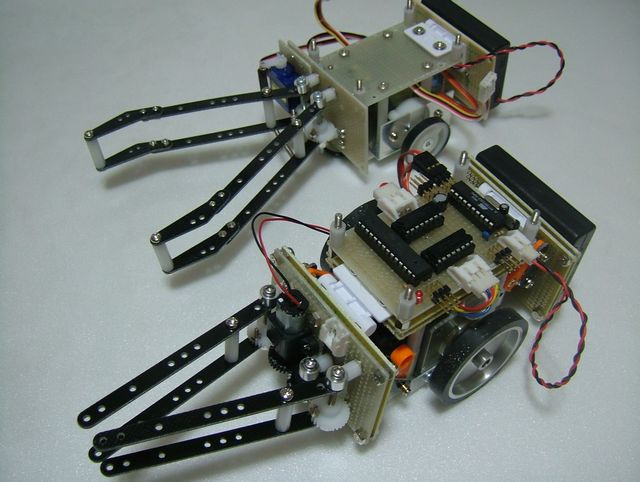
このセットはウォームギヤをシンプルに使ってギヤ部分も小さく、タイヤ径も小さいのが魅力的です。樹脂製のシャーシとモータ部、ギヤ、車輪を使えば、コンパクトな台車を安価に作れそうです。
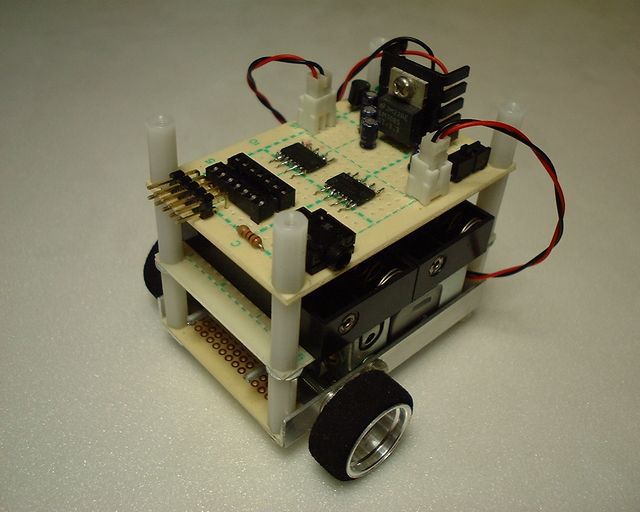
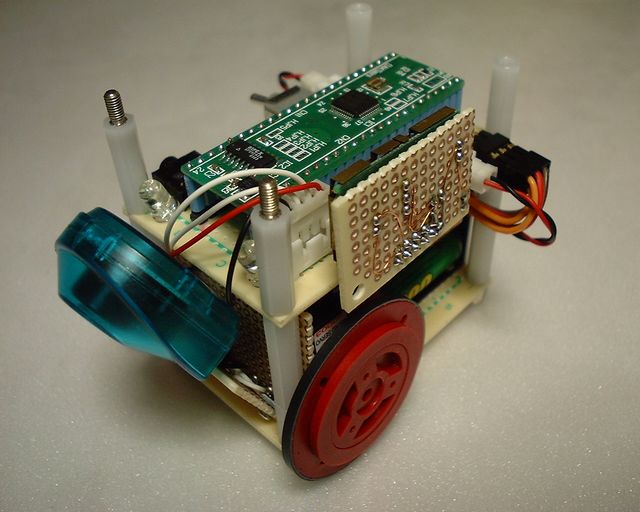
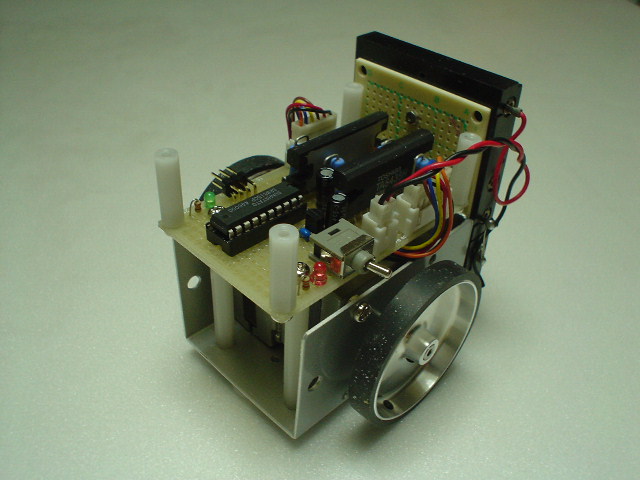
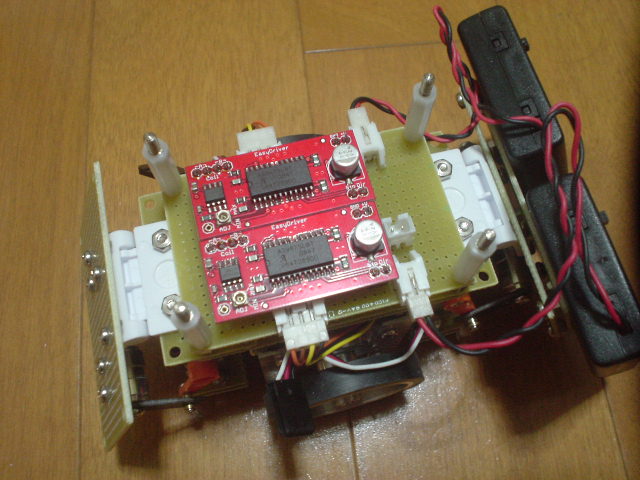
 大きさから色々と検討した結果、秋月のBタイプ基板が台車部のサイズと合うことが分かりました。シャーシをBタイプ基板の大きさに合わせて切断し、基板スペーサを使って基板とシャーシを固定しました。電池ボックスは悩んだ結果、単4電池を4つ縦に搭載してみました。
大きさから色々と検討した結果、秋月のBタイプ基板が台車部のサイズと合うことが分かりました。シャーシをBタイプ基板の大きさに合わせて切断し、基板スペーサを使って基板とシャーシを固定しました。電池ボックスは悩んだ結果、単4電池を4つ縦に搭載してみました。
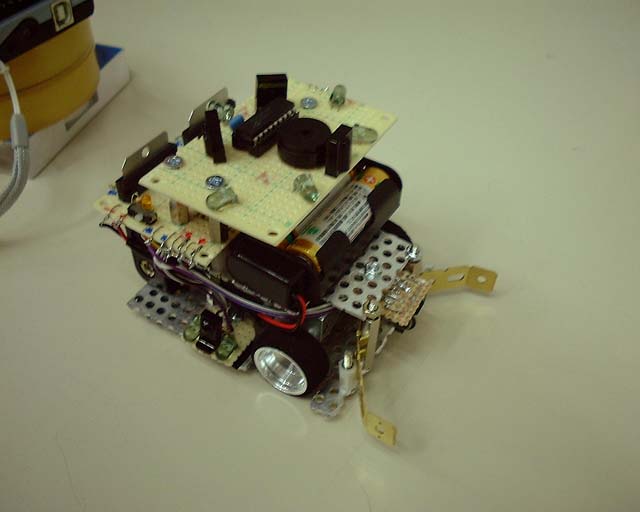
ここまで作ったものの、やる気が失速してしまいました。基板サイズが自分のテイストよりも大きかったことが分かりました。樹脂製シャーシも厚みがありイマイチ加工しにくかったのも一因かもしれません。このBタイプ台車製作は、次のCタイプ台車へ至るための修行だったのでしょうか。





{kind=link}